11.1 Introduction to Cartesian Coordinates in Space
Up to this point in this text we have considered mathematics in a 2-dimensional world. We have plotted graphs on the - plane using rectangular and polar coordinates and found the area of regions in the plane. We have considered properties of solid objects, such as volume and surface area, but only by first defining a curve in the plane and then rotating it out of the plane.
While there is wonderful mathematics to explore in “2D,” we live in a “3D” world and eventually we will want to apply mathematics involving this third dimension. In this section we introduce Cartesian coordinates in space and explore basic surfaces. This will lay a foundation for much of what we do in the remainder of the text.
Each point in space can be represented with an ordered triple, , where , and represent the relative position of along the -, - and -axes, respectively. Each axis is perpendicular to the other two.
Visualizing points in space on paper can be problematic, as we are trying to represent a 3-dimensional concept on a 2-dimensional medium. We cannot draw three lines representing the three axes in which each line is perpendicular to the other two. Despite this issue, standard conventions exist for plotting shapes in space that we will discuss that are more than adequate.
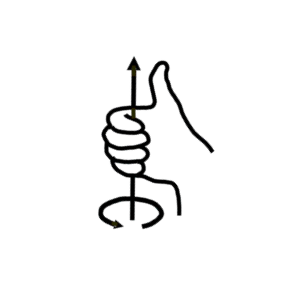 Figure 11.1.1: Illustrating the right hand rule. Figure courtesy of user:Schorschi2 / Wikimedia Commons / Public Domain.
Figure 11.1.1: Illustrating the right hand rule. Figure courtesy of user:Schorschi2 / Wikimedia Commons / Public Domain.
One convention is that the axes must conform to the right hand rule. This rule states that when the fingers of the right hand extend in the direction of the positive -axis and curve toward the positive -axis, then the extended thumb will point in the direction of the positive -axis. (It may take some thought to verify this, but this system is inherently different from the one created by using the “left hand rule.”) Another way to view the rule is that when the index finger of the right hand extends in the direction of the positive -axis, and the middle finger (bent “inward” so it is perpendicular to the palm) points along the positive -axis, then the extended thumb will point in the direction of the positive -axis.
As long as the coordinate axes are positioned so that they follow this rule, it does not matter how the axes are drawn on paper. There are two popular methods that we briefly discuss.
(fullscreen) Figure 11.1.2: Plotting the point in space.
In Figure 11.1.2 we see the point plotted on a set of axes. The basic convention here is that the - plane is drawn in its standard way, with the -axis down to the left. The perspective is that the paper represents the - plane and the positive axis is coming up, off the page. This method is preferred by many engineers. Because it can be hard to tell where a single point lies in relation to all the axes, dashed lines have been added to let one see how far along each axis the point lies.
One can also consider the - plane as being a horizontal plane in, say, a room, where the positive -axis is pointing up. When one steps back and looks at this room, one might draw the axes as shown in Figure 11.1.3. The same point is drawn, again with dashed lines. This point of view is preferred by most mathematicians, and is the convention adopted by this text.
Just as the - and -axes divide the plane into four quadrants, the -, -, and -coordinate planes divide space into eight octants. The octant in which , , and are positive is called the first octant. We will not give special names for the other seven octants.
(fullscreen) Figure 11.1.3: Plotting the point in space with a perspective used in this text.
Measuring Distances
It is of critical importance to know how to measure distances between points in space. The formula for doing so is based on measuring distance in the plane and the Pythagorean theorem, and is known (in both contexts) as the Euclidean measure of distance.
Definition 11.1.1 Distance In Space
Let and be points in space. The distance between and is
We refer to the line segment that connects points and in space as , and refer to the length of this segment as . The above distance formula allows us to compute the length of this segment.
Example 11.1.1 Length of a line segment
Let and let . Draw the line segment and find its length.
SolutionThe points and are plotted in Figure 11.1.4; no special consideration needs to be made to draw the line segment connecting these two points; simply connect them with a straight line. One cannot actually measure this line on the page and deduce anything meaningful; its true length must be measured analytically. Applying Definition 11.1.1, we have
††margin:
(fullscreen)
Figure 11.1.4: Plotting points and in Example 11.1.1.
Spheres
Just as a circle is the set of all points in the plane equidistant from a given point (its center), a sphere is the set of all points in space that are equidistant from a given point. Definition 11.1.1 allows us to write an equation of the sphere.
We start with a point which is to be the center of a sphere with radius . If a point lies on the sphere, then is units from ; that is,
Squaring both sides, we get the standard equation of a sphere in space with center at with radius , as given in the following Key Idea.
Key Idea 11.1.1 Standard Equation of a Sphere in Space
The standard equation of the sphere with radius , centered at , is
Watch the video:
Example of Equation of a Sphere from https://youtu.be/fE_PWxyohXQ
Example 11.1.2 Equation of a sphere
Find the center and radius of the sphere defined by .
SolutionTo determine the center and radius, we must put the equation in standard form. This requires us to complete the square (three times).
The sphere is centered at and has a radius of 4.
The equation of a sphere is an example of an implicit function defining a surface in space. In the case of a sphere, the variables , and are all used. We now consider situations where surfaces are defined where one or two of these variables are absent.
Introduction to Planes in Space
The coordinate axes naturally define three planes (shown in Figure 11.1.5), the coordinate planes: the - plane, the - plane and the - plane. The - plane is characterized as the set of all points in space where the -value is 0. This, in fact, gives us an equation that describes this plane: . Likewise, the - plane is all points where the -value is 0, characterized by .
|
(fullscreen) |
(fullscreen) |
(fullscreen) |
| the - plane | the - plane | the - plane |
(fullscreen) Figure 11.1.6: The plane .
Example 11.1.3 A plane in three dimensions
The equation describes all points in space where the -value is 2. This is a plane, parallel to the - coordinate plane, shown in Figure 11.1.6.
Example 11.1.4 Regions defined by planes
Sketch the region defined by the inequalities .
Solution††margin:
(fullscreen)
Figure 11.1.7: Sketching the boundaries of a region in Example 11.1.4.
The region is all points between the planes and . These planes are sketched in Figure 11.1.7, which are parallel to the - plane. Thus the region extends infinitely in the and directions, and is bounded by planes in the direction.
Cylinders
The equation obviously lacks the and variables, meaning it defines points where the and coordinates can take on any value. Now consider the equation in space. In the plane, this equation describes a circle of radius 1, centered at the origin. In space, the coordinate is not specified, meaning it can take on any value. In Figure 11.1.8 (a), we show part of the graph of the equation by sketching 3 circles: the bottom one has a constant -value of , the middle one has a -value of 0 and the top circle has a -value of 1. By plotting all possible -values, we get the surface shown in Figure 11.1.8 (b). This surface looks like a “tube,” or a “cylinder”, which leads to our next definition.
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.8: Sketching .
Definition 11.1.2 Cylinder
Let be a curve in a plane and let be a line not parallel to . A cylinder is the set of all lines parallel to that pass through . The curve is the directrix of the cylinder, and the lines are the rulings.
In this text, we consider curves that lie in planes parallel to one of the coordinate planes, and lines that are perpendicular to these planes, forming right cylinders. Thus the directrix can be defined using equations involving 2 variables, and the rulings will be parallel to the axis of the 3rd variable.
In the example preceding the definition, the curve in the - plane is the directrix and the rulings are lines parallel to the -axis. (Any circle shown in Figure 11.1.8 can be considered a directrix; we simply choose the one where .) Sample rulings can also be viewed in part (b) of the figure. More examples will help us understand this definition.
Example 11.1.5 Graphing cylinders
Graph the following cylinders.
Solution
-
1.
We can view the equation as a parabola in the - plane, as illustrated in Figure 11.1.9 (a). As does not appear in the equation, the rulings are lines through this parabola parallel to the -axis, shown in (b). These rulings give a general idea as to what the surface looks like, drawn in (c).
(fullscreen)
(fullscreen)
(fullscreen)(a) (b) (c) Figure 11.1.9: Sketching the cylinder defined by . -
2.
We can view the equation as a sine curve that exists in the - plane, as shown in Figure 11.1.10 (a). The rules are parallel to the axis as the variable does not appear in the equation ; some of these are shown in part (b). The surface is shown in part (c) of the figure.
(fullscreen)
(fullscreen)
(fullscreen)(a) (b) (c) Figure 11.1.10: Sketching the cylinder defined by .
Surfaces of Revolution
One of the applications of integration we learned previously was to find the volume of solids of revolution — solids formed by revolving a curve about a horizontal or vertical axis. We now consider how to find the equation of the surface of such a solid.
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.11: Introducing surfaces of revolution.
Consider the surface formed by revolving the curve in the - plane about the -axis. Cross-sections of this surface parallel to the - plane are circles, as shown in Figure 11.1.11(a). Each circle has equation of the form for some radius . The radius is a function of ; in fact, it is . Thus the equation of the surface shown in Figure 11.1.11(b) is
We generalize the above principles to give the equations of surfaces formed by revolving curves about the coordinate axes.
Key Idea 11.1.2 Surfaces of Revolution, Part 1
Let be a radius function.
-
1.
The equation of the surface formed by revolving or about the -axis is .
-
2.
The equation of the surface formed by revolving or about the -axis is .
-
3.
The equation of the surface formed by revolving or about the -axis is .
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.12: Revolving about the -axis in Example 11.1.6.
Example 11.1.6 Finding equation of a surface of revolution
Let on . Find the equation of the surface of revolution formed by revolving about the -axis.
SolutionUsing Key Idea 11.1.2, we find the surface has equation . The curve is sketched in Figure 11.1.12(a) and the surface is drawn in Figure 11.1.12(b).
Note how the surface (and hence the resulting equation) is the same if we began with the curve , which is also drawn in Figure 11.1.12(a).
This particular method of creating surfaces of revolution is limited. For instance, in Example 6.3.5 of Section 6.3 we found the volume of the solid formed by revolving about the -axis. Our current method of forming surfaces can only rotate about the -axis. Trying to rewrite as a function of is not trivial, as simply writing only gives part of the region we desire.
What we desire is a way of writing the surface of revolution formed by rotating about the -axis. We start by first recognizing this surface is the same as revolving about the -axis, although it has a different orientation. This will give us a more natural way of viewing the surface.
A value of is a measurement of distance from the -axis. At the distance , we plot a -height of . When rotating about the -axis, we want all points a distance of from the -axis in the - plane to have a -height of . All such points satisfy the equation ; hence . Replacing with in gives . This is the equation of the surface.
Key Idea 11.1.3 Surfaces of Revolution, Part 2
Let , , be a curve in the - plane. The surface formed by revolving this curve about the -axis has equation .
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.13: Revolving about the -axis in Example 11.1.7.
Example 11.1.7 Finding equation of surface of revolution
Find the equation of the surface found by revolving about the -axis.
SolutionUsing Key Idea 11.1.3, the surface has equation
The curve and surface are graphed in Figure 11.1.13.
Quadric Surfaces
Spheres, planes and cylinders are important surfaces to understand. We now consider one last type of surface, a quadric surface. The definition may look intimidating, but we will show how to analyze these surfaces in an illuminating way.
Definition 11.1.3 Quadric Surface
A quadric surface is the graph of the general second-degree equation in three variables:
When the coefficients , or are not zero, the basic shapes of the quadric surfaces are rotated in space. We will focus on quadric surfaces where these coefficients are 0; we will not consider rotations. There are six basic quadric surfaces: the elliptic paraboloid, elliptic cone, ellipsoid, hyperboloid of one sheet, hyperboloid of two sheets, and the hyperbolic paraboloid.
(fullscreen) Figure 11.1.14: The elliptic paraboloid .
We study each shape by considering traces, that is, intersections of each surface with a plane parallel to a coordinate plane. For instance, consider the elliptic paraboloid , shown in Figure 11.1.14. If we intersect this shape with the plane (i.e., replace with ), we have the equation:
| Divide both sides by : | ||||
This describes an ellipse — so cross sections parallel to the - coordinate plane are ellipses. This ellipse is drawn in the figure.
Now consider cross sections parallel to the - plane. For instance, letting gives the equation , clearly a parabola. Intersecting with the plane gives a cross section defined by , another parabola. These parabolas are also sketched in the figure.
Thus we see where the elliptic paraboloid gets its name: some cross sections are ellipses, and others are parabolas.
Such an analysis can be made with each of the quadric surfaces. We give a sample equation of each, provide a sketch with representative traces, and describe these traces.
One variable in the equation of the elliptic paraboloid will be raised to the first power; above, this is the variable. The paraboloid will “open” in the direction of this variable’s axis. Thus is an elliptic paraboloid that opens along the -axis.
Multiplying the right hand side by defines an elliptic paraboloid that “opens” in the opposite direction.
(fullscreen)
| Plane | Trace |
| Crossed Lines | |
| Crossed Lines | |
| Hyperbola | |
| Hyperbola | |
| Ellipse |
(fullscreen)
(fullscreen)
One can rewrite the equation as . The one variable with a positive coefficient corresponds to the axis that the cones “open” along.
The parabolic traces will open along the axis of the one variable that is raised to the first power.
If , the ellipsoid is a sphere with radius ; compare to Key Idea 11.1.1.
The one variable with a negative coefficient corresponds to the axis along which the hyperboloid “opens”.
The one variable with a positive coefficient corresponds to the axis along which the hyperboloid “opens”. In the case illustrated, when , there is no trace in the plane .
Watch the video:
Introduction to Quadric Surfaces from https://youtu.be/x6c2DdOrkQI
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.21: Sketching an elliptic paraboloid.
Example 11.1.8 Sketching quadric surfaces
Sketch the quadric surface defined by the given equation.
Solution
-
1.
:
We first identify the quadric by pattern-matching with the equations given previously. Only two surfaces have equations where one variable is raised to the first power, the elliptic paraboloid and the hyperbolic paraboloid. In the latter case, the other variables have different signs, so we conclude that this describes a hyperbolic paraboloid. As the variable with the first power is , we note the paraboloid opens along the -axis.To make a decent sketch by hand, we need only draw a few traces. In this case, the traces and form parabolas that outline the shape.
: The trace is the parabola
: The trace is the parabola .
Graphing each trace in the respective plane creates a sketch as shown in Figure 11.1.21(a). This is enough to give an idea of what the paraboloid looks like. The surface is filled in in (b).
-
2.
††margin:
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.22: Sketching an ellipsoid. This is an ellipsoid. We can get a good idea of its shape by drawing the traces in the coordinate planes.: The trace is the ellipse . The major axis is along the -axis with length 6 (as , the length of the axis is 6); the minor axis is along the -axis with length 4.
: The trace is the ellipse The major axis is along the -axis, and the minor axis has length 2 along the -axis.
: The trace is the ellipse with major axis along the -axis.
Graphing each trace in the respective plane creates a sketch as shown in Figure 11.1.22(a). Filling in the surface gives Figure 11.1.22(b).
-
3.
††margin:
:
This defines a hyperbolic paraboloid, very similar to the one shown in the gallery of quadric sections. Consider the traces in the and planes:
(fullscreen)
(a)
(fullscreen)
(b) Figure 11.1.23: Sketching a hyperbolic paraboloid.: The trace is , a parabola opening up in the plane.
: The trace is , a parabola opening down in the plane.
Sketching these two parabolas gives a sketch like that in Figure 11.1.23 (a), and filling in the surface gives a sketch like (b).
Example 11.1.9 Identifying quadric surfaces
Consider the quadric surface shown in Figure 11.1.24. Which of the following equations best fits this surface?
SolutionThe image clearly displays a hyperboloid of two sheets. The gallery informs us that the equation will have a form similar to .
We can immediately eliminate option (a), as the constant in that equation is not 1.
(fullscreen) Figure 11.1.24: A possible equation of this quadric surface is found in Example 11.1.9.
The hyperboloid “opens” along the -axis, meaning must be the only variable with a positive coefficient, eliminating (c).
The hyperboloid is wider in the -direction than in the -direction, so we need an equation where . This eliminates (b), leaving us with (d). We should verify that the equation given in (d), , fits.
We already established that this equation describes a hyperboloid of two sheets that opens in the -direction and is wider in the -direction than in the . Now note the coefficient of the -term. Rewriting in standard form, we have: . Thus when and , must be ; i.e., each hyperboloid “starts” at . This matches our figure.
We conclude that best fits the graph.
This section has introduced points in space and shown how equations can describe surfaces. The next sections explore vectors, an important mathematical object that we’ll use to explore curves in space.
Exercises
Terms and Concepts
-
1.
Axes drawn in space must conform to the rule.
-
2.
In the plane, the equation defines a ; in space, defines a .
-
3.
In the plane, the equation defines a ; in space, defines a .
-
4.
Which quadric surface looks like a Pringles® chip?
-
5.
Consider the hyperbola in the plane. If this hyperbola is rotated about the -axis, what quadric surface is formed?
-
6.
Consider the hyperbola in the plane. If this hyperbola is rotated about the -axis, what quadric surface is formed?
Problems
-
7.
The points , and form a triangle in space. Find the distances between each pair of points and determine if the triangle is a right triangle.
-
8.
The points , , and form a triangle in space. Find the distance between each pair of points and determine if the triangle is isosceles.
-
9.
Explain why three points lie on a line if and only if the distance between two of the points is equal to the sum of the distances from each of these points to the third.
-
10.
Determine whether or not the points , , and lie on a line.
-
11.
Determine whether or not the points , , and lie on a line.
-
12.
The points , , and form a quadrilateral in space. Is this a parallelogram?
-
13.
Find the center and radius of the sphere defined by
-
14.
Find the center and radius of the sphere defined by
-
15.
Show that the point is inside the sphere given by
Is closer to the center of the sphere or to the surface of the sphere?
-
16.
Let and be points in space. Show that the midpoint of is
In Exercises 7–20, describe the region in space defined by the inequalities.
-
17.
-
18.
-
19.
-
20.
In Exercises 21–24, sketch the cylinder in space.
-
21.
-
22.
-
23.
-
24.
In Exercises 25–28, give the equation of the surface of revolution described.
-
25.
Revolve about the -axis.
-
26.
Revolve about the -axis.
-
27.
Revolve about the -axis.
-
28.
Revolve about the -axis.
In Exercises 29–32, a quadric surface is sketched. Determine which of the given equations best fits the graph.
-
29.
(fullscreen)(a) (b)
-
30.
(fullscreen)(a) (b)
-
31.
(fullscreen)(a) (b)
-
32.
(fullscreen)(a) (b)
In Exercises 33–40, sketch the quadric surface.
-
33.
-
34.
-
35.
-
36.
-
37.
-
38.
-
39.
-
40.

{kind=link}