11.2 An Introduction to Vectors
Many quantities we think about daily can be described by a single number: temperature, speed, cost, weight and height. There are also many other concepts we encounter daily that cannot be described with just one number. For instance, a weather forecaster often describes wind with its speed and its direction (“…with winds from the southeast gusting up to 30 mph …”). When applying a force, we are concerned with both the magnitude and direction of that force. In both of these examples, direction is important. Because of this, we study vectors, mathematical objects that convey both magnitude and direction information.
One “bare-bones” definition of a vector is based on what we wrote above: “a vector is a mathematical object with magnitude and direction parameters.” This definition leaves much to be desired, as it gives no indication as to how such an object is to be used. Several other definitions exist; we choose here a definition rooted in a geometric visualization of vectors. It is very simplistic but readily permits further investigation.
Definition 11.2.1 Vector
A vector is a directed line segment.
Given points and (either in the plane or in space), we denote with the vector from to . The point is said to be the initial point of the vector, and the point is the terminal point.
The magnitude, length or norm of is the length of the line segment : .
Two vectors are equal if they have the same magnitude and direction.
Figure 11.2.1 shows multiple instances of the same vector. Each directed line segment has the same direction and length (magnitude), hence each is the same vector.
We use (pronounced “r two”) to represent all the vectors in the plane, and use (pronounced “r three”) to represent all the vectors in space.
Consider the vectors and as shown in Figure 11.2.2. The vectors look to be equal; that is, they seem to have the same length and direction. Indeed, they are. Both vectors move 2 units to the right and 1 unit up from the initial point to reach the terminal point. One can analyze this movement to measure the magnitude of the vector, and the movement itself gives direction information (one could also measure the slope of the line passing through and or and ). Since they have the same length and direction, these two vectors are equal.
This demonstrates that inherently all we care about is displacement; that is, how far in the , and possibly directions the terminal point is from the initial point. Both the vectors and in Figure 11.2.2 have an -displacement of 2 and a -displacement of 1. This suggests a standard way of describing vectors in the plane. A vector whose -displacement is and whose -displacement is will have terminal point when the initial point is the origin, . This leads us to a definition of a standard and concise way of referring to vectors.
Definition 11.2.2 Component Form of a Vector
-
1.
The component form of a vector in , whose terminal point is when its initial point is , is
-
2.
The component form of a vector in , whose terminal point is when its initial point is , is
The numbers , (and , respectively) are the components of .
It follows from the definition that the component form of the vector , where and is
in space, where and , the component form of is
Watch the video:
An Introduction to Vectors, Part 1 from https://youtu.be/60btq9PN8IM
We practice using this notation in the following example.
Example 11.2.1 Using component form notation for vectors
-
1.
Sketch the vector starting at and find its magnitude.
-
2.
Find the component form of the vector whose initial point is and whose terminal point is .
-
3.
Sketch the vector starting at the point and find its magnitude.
Solution
-
1.
Using as the initial point, we move 2 units in the positive -direction and units in the positive -direction to arrive at the terminal point , as drawn in Figure 11.2.3(a).
The magnitude of is determined directly from the component form:
††margin: (a)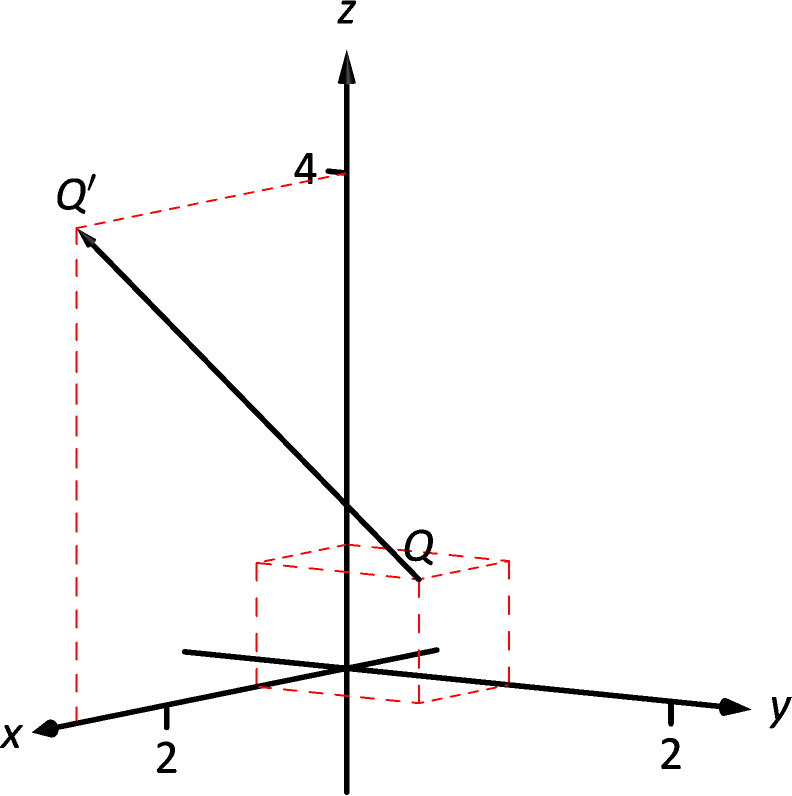 (b)
Figure 11.2.3: Graphing vectors in Example 11.2.1.
(b)
Figure 11.2.3: Graphing vectors in Example 11.2.1.
-
2.
Using the paragraph following Definition 11.2.2, we have
One can readily see from Figure 11.2.3(a) that the - and -displacement of is 2 and 4, respectively, as the component form suggests.
-
3.
Using as the initial point, we move 2 units in the positive -direction, unit in the positive -direction, and 3 units in the positive -direction to arrive at the terminal point , illustrated in Figure 11.2.3(b).
The magnitude of is:
Now that we have defined vectors, and have created a nice notation by which to describe them, we start considering how vectors interact with each other. That is, we define an algebra on vectors.
Definition 11.2.3 Vector Algebra
-
1.
Let and be vectors in , and let be a scalar.
-
(a)
The addition, or sum, of the vectors and is the vector
-
(b)
The scalar product of and is the vector
-
(a)
-
2.
Let and be vectors in , and let be a scalar.
-
(a)
The addition, or sum, of the vectors and is the vector
-
(b)
The scalar product of and is the vector
-
(a)
In short, we say addition and scalar multiplication are computed “component-wise.”
Example 11.2.2 Adding vectors
Sketch the vectors , and all with initial point at the origin.
SolutionWe first compute . ††margin: Figure 11.2.4: Graphing the sum of vectors in Example 11.2.2.
These are all sketched in Figure 11.2.4.
As vectors convey magnitude and direction information, the sum of vectors also convey length and magnitude information. Adding suggests the following idea:
“Starting at an initial point, go out , then go out .”
This idea is sketched in Figure 11.2.5, where the initial point of is the terminal point of . This is known as the “Head to Tail Rule” of adding vectors. Vector addition is very important. For instance, if the vectors and represent forces acting on a body, the sum gives the resulting force. Because of various physical applications of vector addition, the sum is often referred to as the resultant vector, or just the “resultant.”
Analytically, it is easy to see that . Figure 11.2.5 also gives a graphical representation of this, using gray vectors. Note that the vectors and , when arranged as in the figure, form a parallelogram. Because of this, the Head to Tail Rule is also known as the Parallelogram Law: the vector is defined by forming the parallelogram defined by the vectors and ; the initial point of is the common initial point of parallelogram, and the terminal point of the sum is the common terminal point of the parallelogram.
While not illustrated here, the Head to Tail Rule and Parallelogram Law hold for vectors in as well.
It follows from the properties of the real numbers and Definition 11.2.3 that
The Parallelogram Law gives us a good way to visualize this subtraction. We demonstrate this in the following example.
Example 11.2.3 Vector Subtraction
Let and Compute and sketch .
SolutionThe computation of is straightforward, and we show all steps below. Usually the formal step of multiplying by is omitted and we “just subtract.” ††margin: Figure 11.2.6: Illustrating how to subtract vectors graphically.
Figure 11.2.6 illustrates, using the Head to Tail Rule, how the subtraction can be viewed as the sum . The figure also illustrates how can be obtained by looking only at the terminal points of and (when their initial points are the same).
Example 11.2.4 Scaling vectors
-
1.
Sketch the vectors and with initial point at the origin.
-
2.
Compute the magnitudes of and .
Solution
-
1.
We compute :
††margin: Figure 11.2.7: Graphing vectors and in Example 11.2.4.Both and are sketched in Figure 11.2.7. Make note that does not start at the terminal point of ; rather, its initial point is also the origin.
-
2.
The figure suggests that is twice as long as . We compute their magnitudes to confirm this.
As we suspected, is twice as long as .
The zero vector is the vector whose initial point is also its terminal point. It is denoted by . Its component form, in , is ; in , it is . Usually the context makes is clear whether is referring to a vector in the plane or in space.
Our examples have illustrated key principles in vector algebra: how to add and subtract vectors and how to multiply vectors by a scalar. The following theorem states formally the properties of these operations.
Theorem 11.2.1 Properties of Vector Operations
The following are true for all scalars and , and for all vectors , and , where , and are all in or where , and are all in :
-
1.
Commutative Property
-
2.
Associative Property
-
3.
Additive Identity
-
4.
-
5.
Distributive Property
-
6.
Distributive Property
-
7.
-
8.
-
9.
if, and only if, .
As stated before, each vector conveys magnitude and direction information. We have a method of extracting the magnitude, which we write as . Unit vectors are a way of extracting just the direction information from a vector.
Definition 11.2.4 Unit Vector
A unit vector is a vector with a magnitude of 1; that is,
Consider this scenario: you are given a vector and are told to create a vector of length 10 in the direction of . How does one do that? If we knew that was the unit vector in the direction of , the answer would be easy: . So how do we find ?
Property 8 of Theorem 11.2.1 holds the key. If we divide by its magnitude, it becomes a vector of length 1. Consider:
| (we can pull out as it is a scalar) | ||||
So the vector of length 10 in the direction of is An example will make this more clear.
Example 11.2.5 Using Unit Vectors
Let and let .
-
1.
Find the unit vector in the direction of .
-
2.
Find the unit vector in the direction of .
-
3.
Find the vector in the direction of with magnitude 5.
Solution
-
1.
We find . So the unit vector in the direction of is
-
2.
††margin: Figure 11.2.8: Graphing vectors in Example 11.2.5. All vectors shown have their initial point at the origin.
We find , so the unit vector in the direction of is
-
3.
To create a vector with magnitude 5 in the direction of , we multiply the unit vector by 5. Thus is the vector we seek. This is sketched in Figure 11.2.8.
The basic formation of the unit vector in the direction of a vector leads to a interesting equation. It is:
We rewrite the equation with parentheses to make a point:
This equation illustrates the fact that a vector has both magnitude and direction, where we view a unit vector as supplying only direction information. Identifying unit vectors with direction allows us to define parallel vectors.
Definition 11.2.5 Parallel Vectors
-
1.
Unit vectors and are parallel if .
-
2.
Nonzero vectors and are parallel if their respective unit vectors are parallel.
It is equivalent to say that vectors and are parallel if there is a scalar such that (see marginal note). ††margin: Note: is directionless; because , there is no unit vector in the “direction” of . Some texts define two vectors as being parallel if one is a scalar multiple of the other. By this definition, is parallel to all vectors as for all . We prefer the given definition of parallel as it is grounded in the fact that unit vectors provide direction information. One may adopt the convention that is parallel to all vectors if they desire. (See also the marginal note at Theorem 11.4.2.)
If one graphed all unit vectors in with the initial point at the origin, then the terminal points would all lie on the unit circle. Based on what we know from trigonometry, we can then say that the component form of all unit vectors in is for some angle .
A similar construction in shows that the terminal points all lie on the unit sphere. These vectors also have a particular component form, but its derivation is not as straightforward as the one for unit vectors in . Important concepts about unit vectors are given in Key Idea 11.2.1 below.
Key Idea 11.2.1 Unit Vectors
-
1.
The unit vector in the direction of is
-
2.
A vector in is a unit vector if, and only if, its component form is for some angle .
-
3.
A vector in is a unit vector if, and only if, its component form is for some angles and .
These formulas can come in handy in a variety of situations, especially the formula for unit vectors in the plane.
Example 11.2.6 Finding Component Forces
Consider a weight of 50lb hanging from two chains, as shown in Figure 11.2.9. One chain makes an angle of with the vertical, and the other an angle of . Find the force applied to each chain.
SolutionKnowing that gravity is pulling the 50lb weight straight down, we can create a vector to represent this force.
We can view each chain as “pulling” the weight up, preventing it from falling. We can represent the force from each chain with a vector. Let represent the force from the chain making an angle of with the vertical, and let represent the force form the other chain. Convert all angles to be measured from the horizontal (as shown in Figure 11.2.10), and apply Key Idea 11.2.1. As we do not yet know the magnitudes of these vectors, (that is the problem at hand), we use and to represent them.
As the weight is not moving, we know the sum of the forces is . This gives:
The sum of the entries in the first component is 0, and the sum of the entries in the second component is also 0. This leads us to the following two equations:
This is a simple 2-equation, 2-unknown system of linear equations. We leave it to the reader to verify that the solution is
It might seem odd that the sum of the forces applied to the chains is more than 50lb. We leave it to a physics class to discuss the full details, but offer this short explanation. Our equations were established so that the vertical components of each force sums to 50lb, thus supporting the weight. Since the chains are at an angle, they also pull against each other, creating an “additional” horizontal force while holding the weight in place.
Unit vectors were very important in the previous calculation; they allowed us to define a vector in the proper direction but with an unknown magnitude. Our computations were then computed component-wise. Because such calculations are often necessary, the standard unit vectors can be useful.
Definition 11.2.6 Standard Unit Vectors
-
1.
In , the standard unit vectors are
-
2.
In , the standard unit vectors are
Example 11.2.7 Using standard unit vectors
-
1.
Rewrite using the standard unit vectors.
-
2.
Rewrite in component form.
Solution
-
1.
-
2.
These two examples demonstrate that converting between component form and the standard unit vectors is rather straightforward. Many mathematicians prefer component form, and it is the preferred notation in this text. Many engineers prefer using the standard unit vectors, and many engineering texts use that notation.
Example 11.2.8 Finding Component Force
A weight of 25lb is suspended from a chain of length 2ft while a wind pushes the weight to the right with constant force of 5lb as shown in Figure 11.2.11. What angle will the chain make with the vertical as a result of the wind’s pushing? How much higher will the weight be?
SolutionThe force of the wind is represented by the vector . The force of gravity on the weight is represented by . The direction and magnitude of the vector representing the force on the chain are both unknown. We represent this force with
for some magnitude and some angle with the horizontal . (Note: is the angle the chain makes with the vertical; is the angle with the horizontal.)
As the weight is at equilibrium, the sum of the forces is :
Thus the sum of the and components are 0, leading us to the following system of equations:
| (11.1) | ||||
| (11.2) |
This is enough to determine already, as we know and . Thus We can use this to find the magnitude :
We can then use either equality from Equation (11.2) to solve for . We choose the first equality as using arccosine will return an angle in the quadrant:
Subtracting from this angle gives us an angle of with the vertical.
We can now use trigonometry to find out how high the weight is lifted. Figure 11.2.11 shows that a right triangle is formed with the 2ft chain as the hypotenuse. We have found that the interior angle is . The length of the adjacent side (in the diagram, the dashed vertical line) is ft. Thus the weight is lifted by about ft, almost 1/2in.
The algebra we have applied to vectors is already demonstrating itself to be very useful. There are two more fundamental operations we can perform with vectors, the dot product and the cross product. The next two sections explore each in turn.
Exercises 11.2
Terms and Concepts
-
1.
Name two different things that cannot be described with just one number, but rather need 2 or more numbers to fully describe them.
-
2.
What is the difference between and ?
-
3.
What is a unit vector?
-
4.
Unit vectors can be thought of as conveying what type of information?
-
5.
What does it mean for two vectors to be parallel?
-
6.
What effect does multiplying a vector by have?
Problems
In Exercises 7–10, points and are given. Write the vector in component form and using the standard unit vectors.
-
7.
,
-
8.
,
-
9.
,
-
10.
,
-
11.
Let and . (a) Find , , . (b) Sketch the above vectors on the same axes, along with and . (c) Find where .
-
12.
Let and . (a) Find , , . (b) Sketch the above vectors on the same axes, along with and . (c) Find where .
In Exercises 13–16, sketch , , and on the same axes.
-
13.
-
14.
-
15.
-
16.
In Exercises 17–20, find , , and .
-
17.
,
-
18.
,
-
19.
,
-
20.
,
In Exercises 21–24, find the unit vector in the direction of .
-
21.
-
22.
-
23.
-
24.
-
25.
Under what conditions is ?
-
26.
Find the unit vector in the first quadrant of that makes a angle with the -axis.
-
27.
Find the unit vector in the second quadrant of that makes a angle with the -axis.
-
28.
Verify, from Key Idea 11.2.1, that is a unit vector for all angles and .
A weight of 100lb is suspended from two chains, making angles with the vertical of and as shown in the figure below.
In Exercises 29–32, angles and are given. Find the magnitude of the force applied to each chain.
-
29.
,
-
30.
,
-
31.
,
-
32.
,
A weight of lb is suspended from a chain of length while a constant force of pushes the weight to the right, making an angle of with the vertical, as shown in the figure below.
In Exercises 33–36, a force and length are given. Find the angle and the height the weight is lifted as it moves to the right.
-
33.
lb, ft, lb
-
34.
lb, ft, lb
-
35.
lb, ft, lb
-
36.
lb, ft, lb
-
37.
Let and be points in space. Let be the midpoint of . Explain why and . Use these facts to find the coordinates of the point (again).
-
38.
Let , , and be the three corners of a parallelogram in space. Find the possible locations of the fourth corner.
-
39.
Use vectors to show that the diagonals of a parallelogram bisect each other.
-
40.
A median of a triangle is a line segment from a vertex to the midpoint of the opposite side. Show that the three medians of a triangle intersect in a single point. This point is called the centroid of the triangle. Show that the distance from a vertex to the centroid is two-thirds the length of the median from this vertex.
