15.7 The Divergence Theorem and Stokes’ Theorem
The Divergence Theorem
Theorem 15.4.2 gives the Divergence Theorem in the plane, which states that the flux of a vector field across a closed curve equals the sum of the divergences over the region enclosed by the curve. Recall that the flux was measured via a line integral, and the sum of the divergences was measured through a double integral.
We now consider the three-dimensional version of the Divergence Theorem. It states, in words, that the flux across a closed surface equals the sum of the divergences over the domain enclosed by the surface. Since we are in space (versus the plane), we measure flux via a surface integral, and the sums of divergences will be measured through a triple integral.
Theorem 15.7.1 The Divergence Theorem (in space)
Let be a closed domain in space whose boundary is an orientable, piecewise smooth surface with outer unit normal vector , and let be a vector field whose components are differentiable on . Then
Watch the video:
Divergence theorem example 1 — Divergence theorem — Multivariable Calculus — Khan Academy from https://youtu.be/asyIsn59Lnc
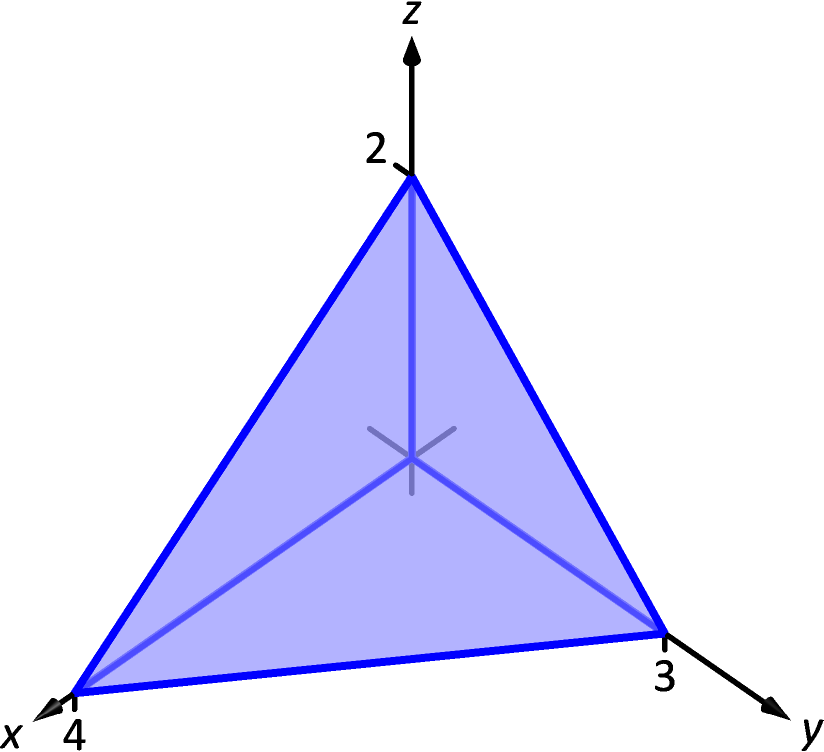
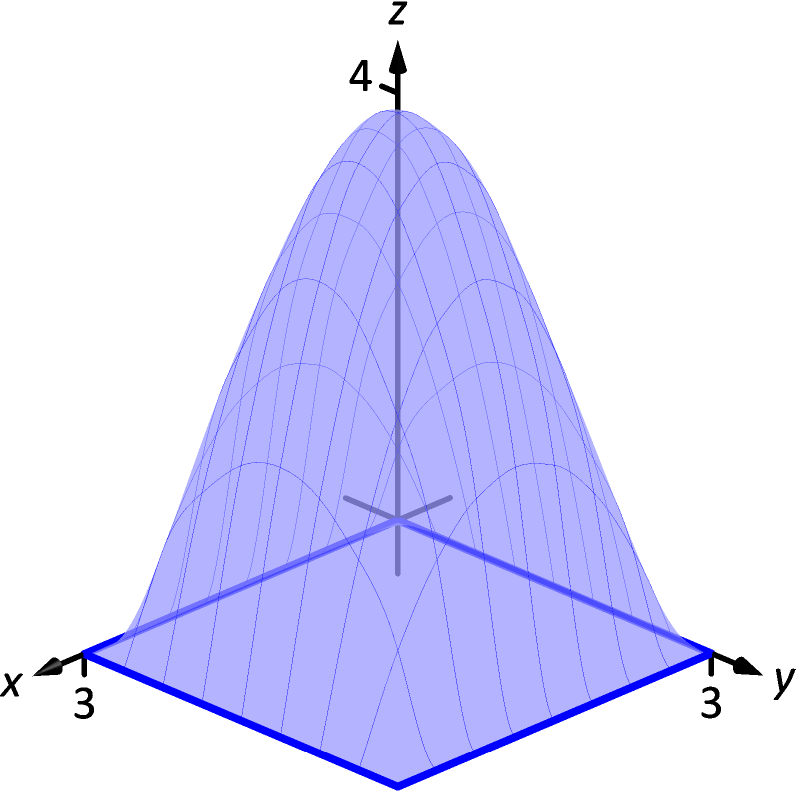
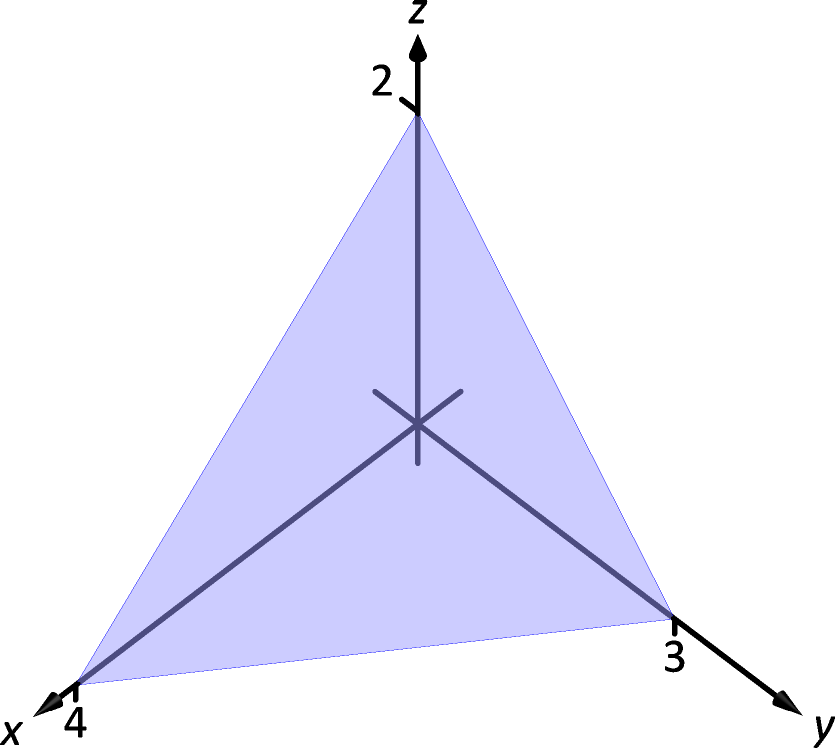
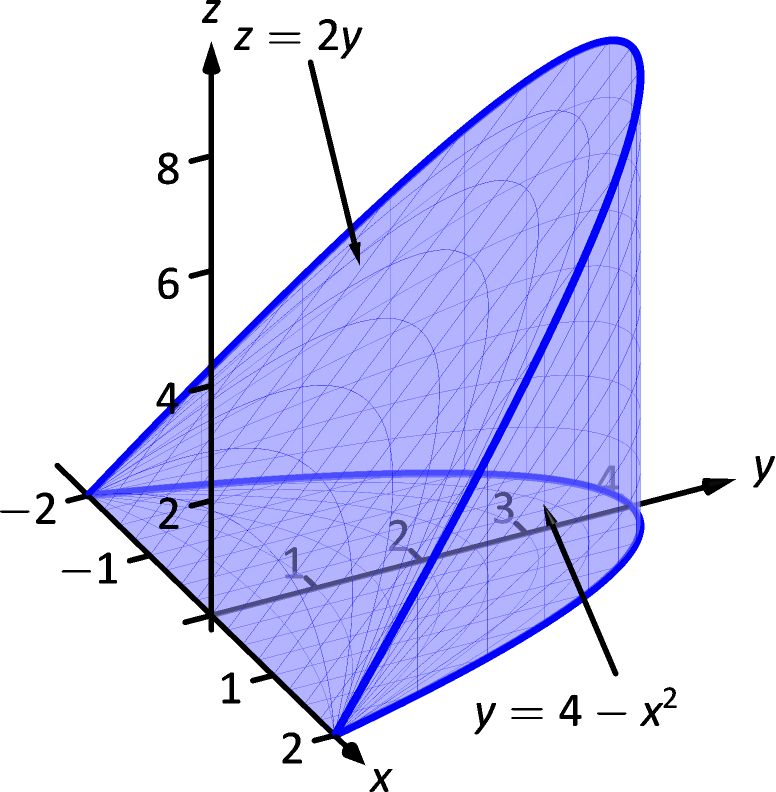
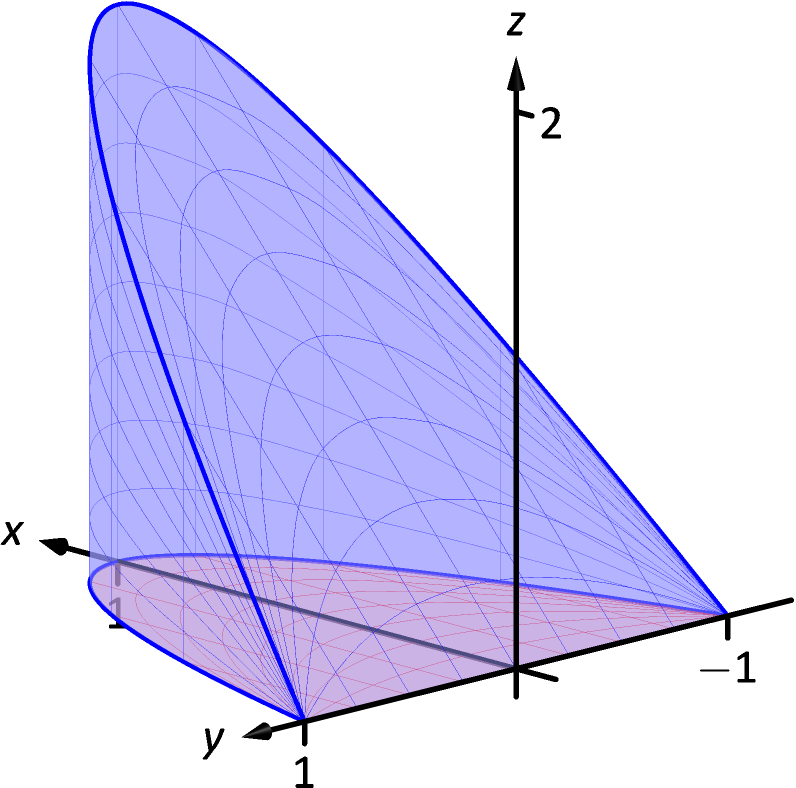 Figure 15.7.1: The surfaces used in Example 15.7.1.
Figure 15.7.1: The surfaces used in Example 15.7.1.
Example 15.7.1 Using the Divergence Theorem in space
Let be the domain in space bounded by the planes and , along with the cylinder , as graphed in Figure 15.7.1, let be the boundary of , and let .
Verify the Divergence Theorem by finding the total outward flux of across , and show this is equal to .
SolutionThe surface is piecewise smooth, comprising surfaces , which is part of the plane , surface , which is part of the cylinder , and surface , which is part of the plane . To find the total outward flux across , we need to compute the outward flux across each of these three surfaces.
We leave it to the reader to confirm that surfaces , and can be parameterized by , and respectively as
where and for all three functions.
We compute a unit normal vector for each as , though recall that as we are integrating , we actually only use . Finally, in previous flux computations, it did not matter which direction pointed as long as we made note of its direction. When using the Divergence Theorem, we need to point to the outside of the closed surface, so in practice this means we’ll either use or , depending on which points outside of the closed surface .
We leave it to the reader to confirm the following cross products and integrations are correct.
For , we need to use . (Note the -component is nonnegative as , therefore this vector always points up, meaning to the outside, of .) The flux across is:
For , we use . (Note the -component is always nonnegative, meaning this vector points outside .) The flux across is:
For , we use . (Note the -component is never positive, meaning this vector points down, outside of .) The flux across is:
Thus the total outward flux, measured by surface integrals across all three component surfaces of , is . We now find the total outward flux by integrating over .
Following the steps outlined in Section 14.6, we see the bounds of , and can be set as (thinking “surface to surface, curve to curve, point to point”):
With , we find the total outward flux of over as:
the same result we obtained previously.
In Example 15.7.1 we see that the total outward flux of a vector field across a closed surface can be found two different ways because of the Divergence Theorem. One computation took far less work to obtain. In that particular case, since was comprised of three separate surfaces, it was far simpler to compute one triple integral than three surface integrals (each of which required partial derivatives and a cross product). In practice, if outward flux needs to be measured, one would choose only one method. We will use both methods in this section simply to reinforce the truth of the Divergence Theorem.
We practice again in the following example.
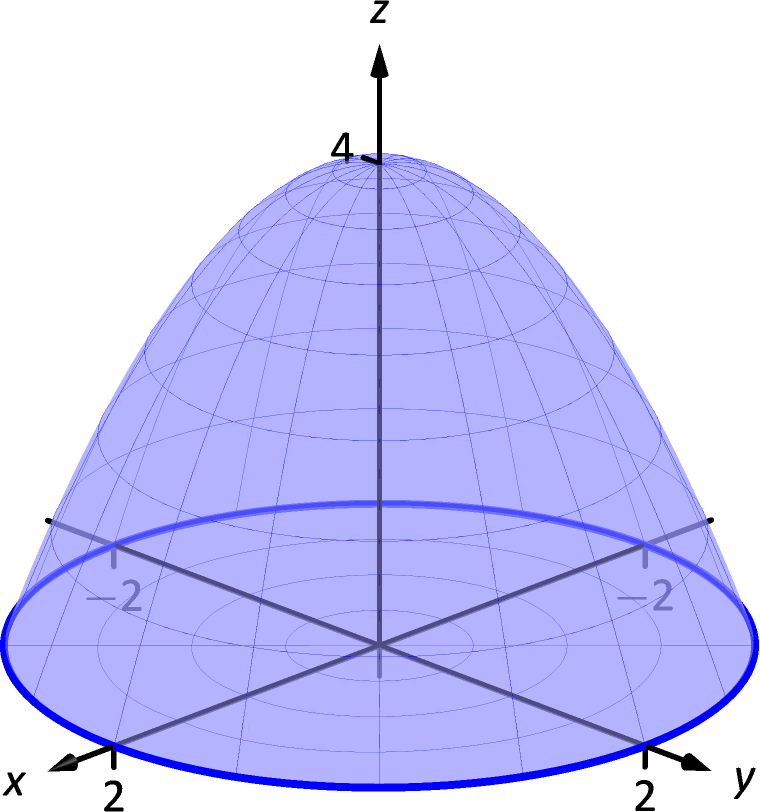
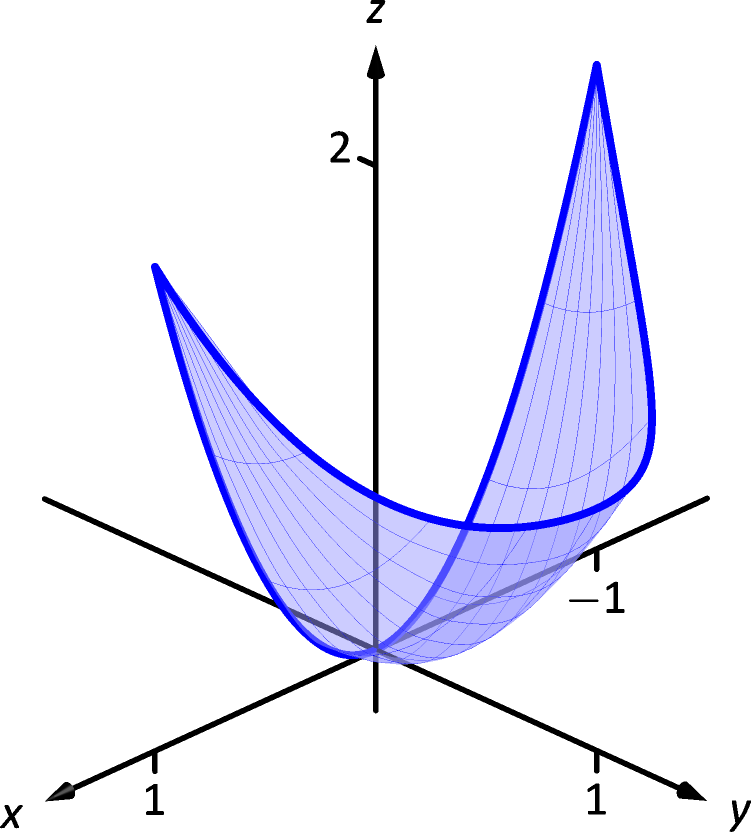
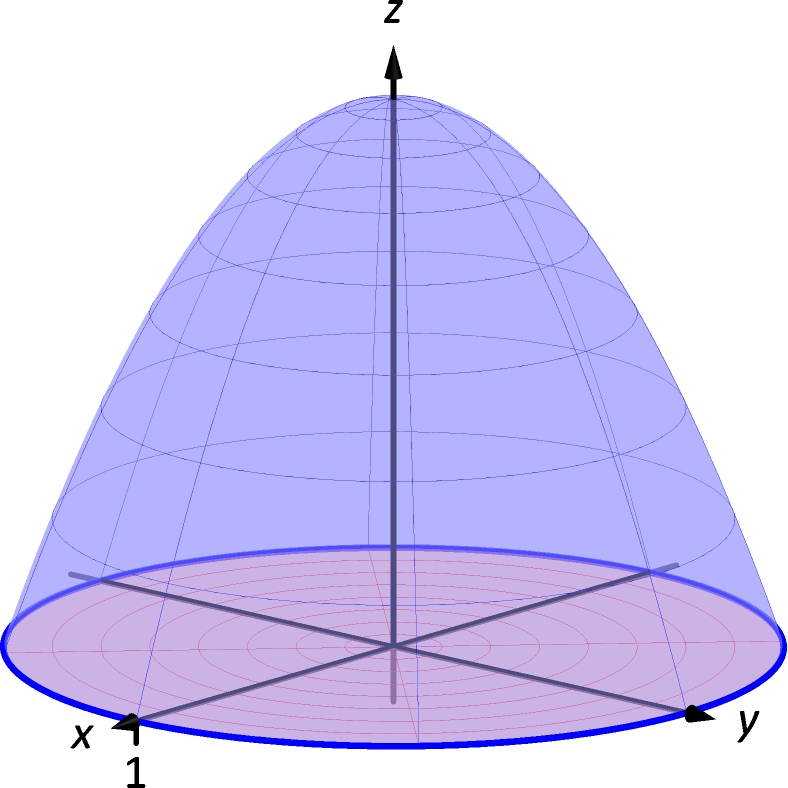 Figure 15.7.2: The surfaces used in Example 15.7.2.
Figure 15.7.2: The surfaces used in Example 15.7.2.
Example 15.7.2 Using the Divergence Theorem in space
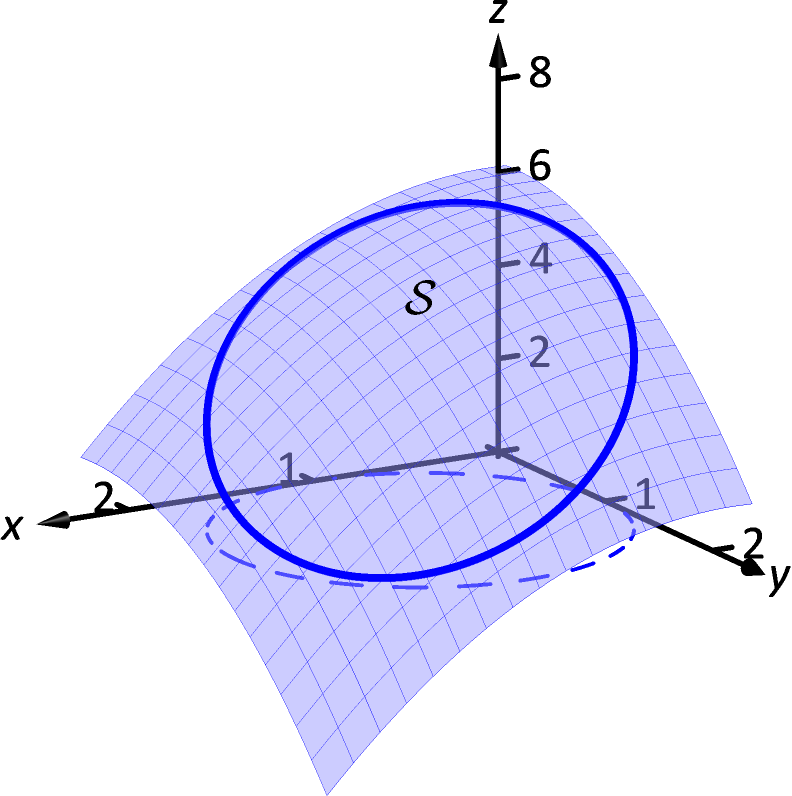
Let be the surface formed by the paraboloid , , and the unit disk centered at the origin in the - plane, graphed in Figure 15.7.2, and let . (This surface and vector field were used in Example 15.6.3.)
Verify the Divergence Theorem; find the total outward flux across and evaluate the triple integral of , showing that these two quantities are equal.
SolutionWe find the flux across first. As is piecewise-smooth, we decompose it into smooth components , the disk, and , the paraboloid, and find the flux across each.
In Example 15.6.3, we found the flux across is 0. We also found that the flux across is . (In that example, the normal vector had a positive component hence was an outer normal.) Thus the total outward flux is .
We now compute . We can describe as the domain bounded by (think “surface to surface, curve to curve, point to point”):
This description of is not very easy to integrate. With polar, we can do better. Let represent the unit disk, which can be described in polar simply as , where and . With and , the surface becomes
Thus can be described as the domain bounded by:
With , we can integrate, recalling that :
which matches our flux computation above.
Example 15.7.3 A “paradox” of the Divergence Theorem and Gauss’s Law
The magnitude of many physical quantities (such as light intensity or electromagnetic and gravitational forces) follow an “inverse square law”: the magnitude of the quantity at a point is inversely proportional to the square of the distance to the source of the quantity.
Let a point light source be placed at the origin and let be the vector field which describes the intensity and direction of the emanating light. At a point , the unit vector describing the direction of the light passing through that point is . As the intensity of light follows the inverse square law, the magnitude of at is for some constant . Taken together,
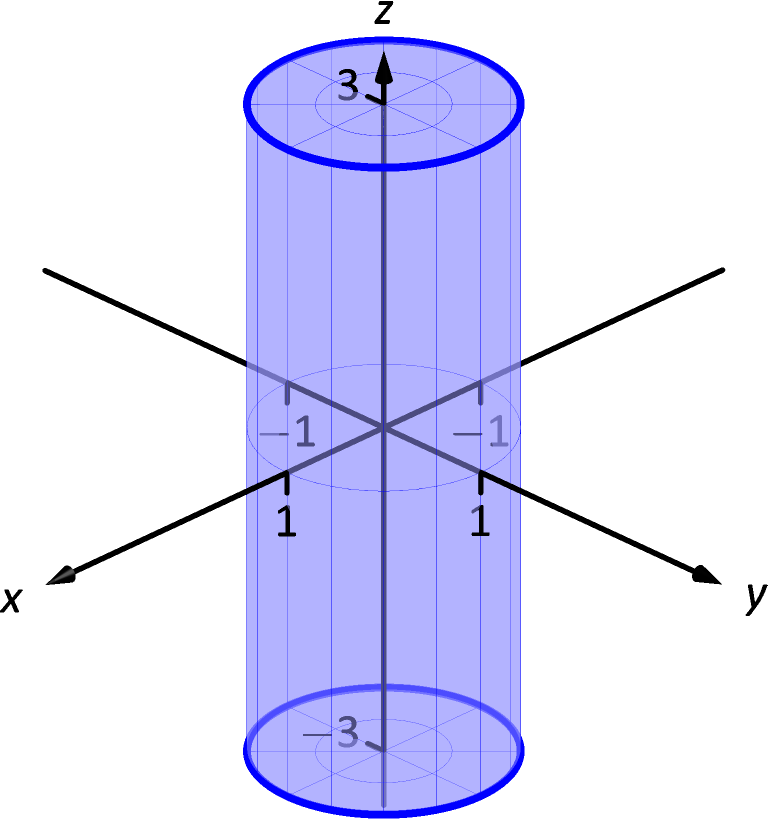
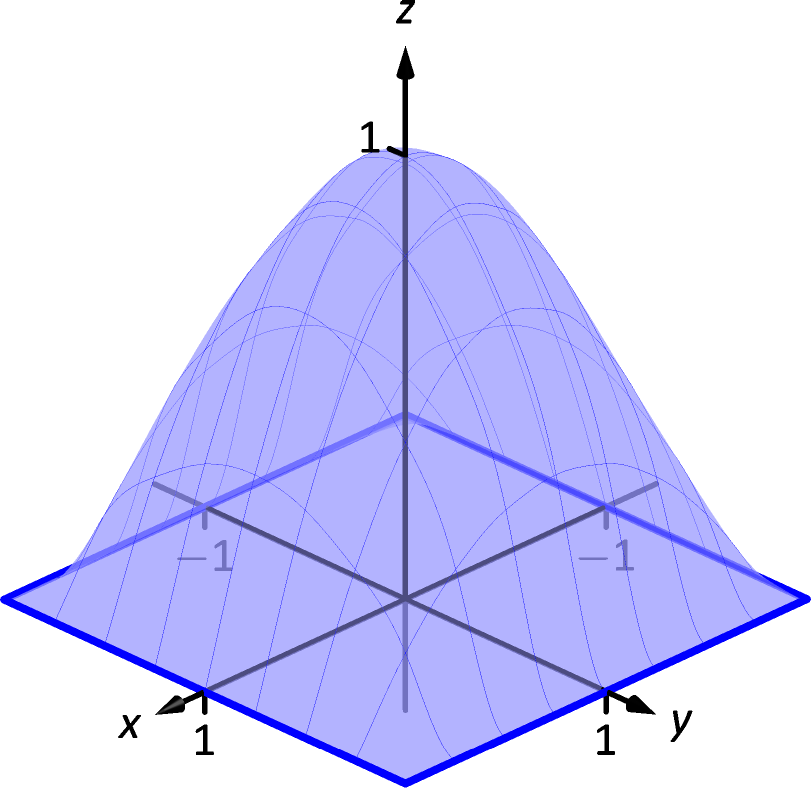
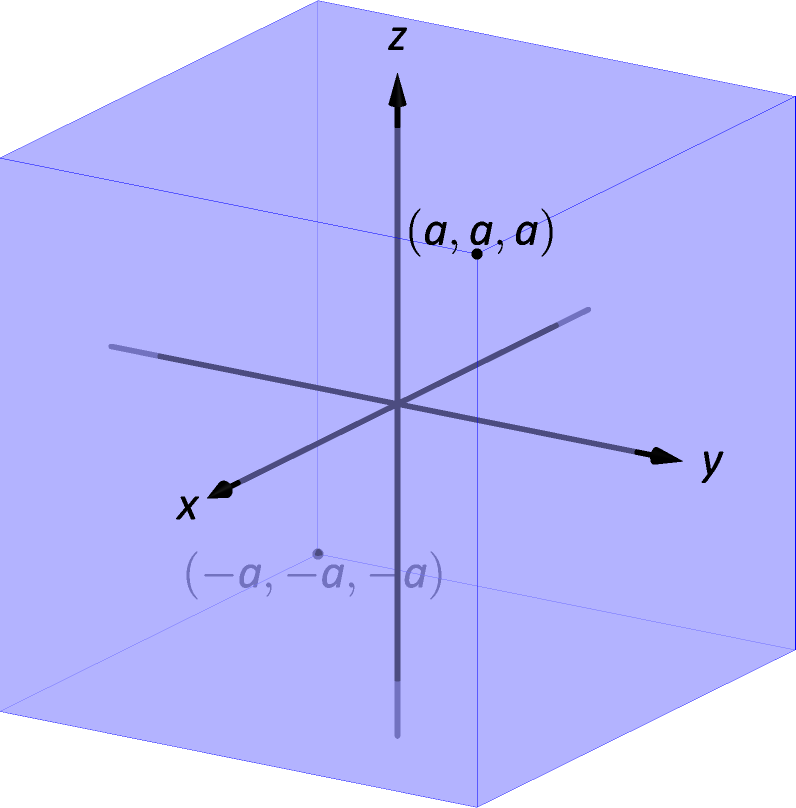 Figure 15.7.3: The cube used in Example 15.7.3.
Figure 15.7.3: The cube used in Example 15.7.3.
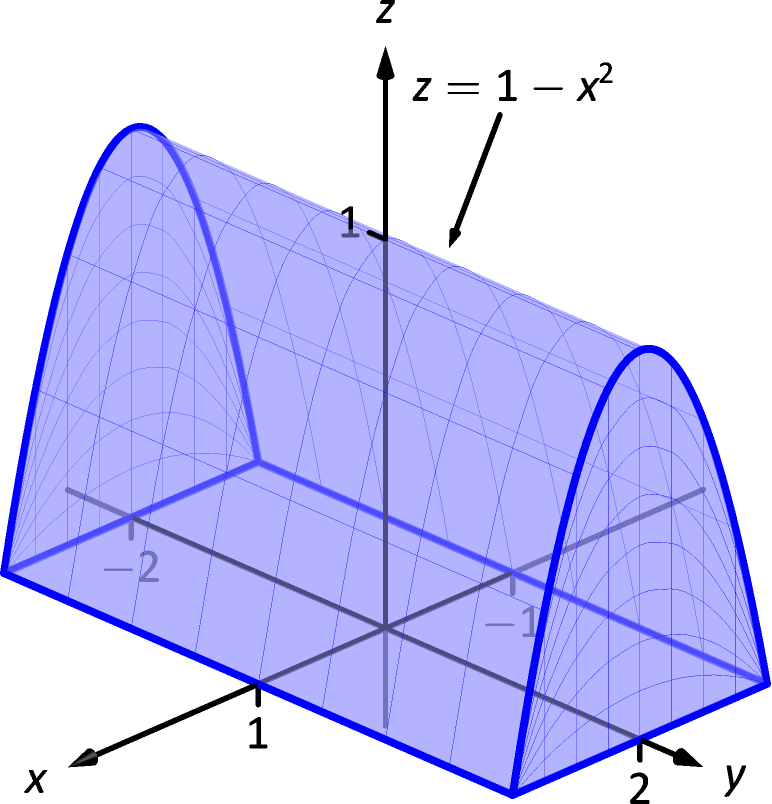
Consider the cube, centered at the origin, with sides of length for some (hence corners of the cube lie at , , etc., as shown in Figure 15.7.3). Find the flux across the six faces of the cube and compare this to .
SolutionLet be the “top” face of the cube, which can be parameterized by for , . We leave it to the reader to confirm that , which points outside of the cube.
The flux across this face is:
| Flux | ||||
| This double integral is not trivial to compute, requiring multiple trigonometric substitutions. This example is not meant to stress integration techniques, so we leave it to the reader to confirm the result is | ||||
Note how the result is independent of ; no matter the size of the cube, the flux through the top surface is always .
An argument of symmetry shows that the flux through each of the six faces is , thus the total flux through the faces of the cube is .
It takes a bit of algebra, but we can show that . Thus the Divergence Theorem would seem to imply that the total flux through the faces of the cube should be
but clearly this does not match the result from above. What went wrong?
Revisit the statement of the Divergence Theorem. One of the conditions is that the components of must be differentiable on the domain enclosed by the surface. In our case, is not differentiable at the origin — it is not even defined! As does not satisfy the conditions of the Divergence Theorem, it does not apply, and we cannot expect .
Since is differentiable everywhere except the origin, the Divergence Theorem does apply over any domain that does not include the origin. Let be any surface that encloses the cube used before, and let be the domain between the cube and ; note how does not include the origin and so the Divergence Theorem does apply over this domain. The total outward flux over is thus , which means the amount of flux coming out of is the same as the amount of flux coming out of the cube. The conclusion: the flux across any surface enclosing the origin will be .
This has an important consequence in electrodynamics. Let be a point charge at the origin. The electric field generated by this point charge is
i.e., it is with , where is a physical constant (the “permittivity of free space”). Gauss’s Law states that the outward flux of across any surface enclosing the origin is .
Our interest in the Divergence Theorem is twofold. First, it’s truth alone is interesting: to study the behavior of a vector field across a closed surface, one can examine properties of that field within the surface. Secondly, it offers an alternative way of computing flux. When there are multiple methods of computing a desired quantity, one has power to select the easiest computation as illustrated next.
Example 15.7.4 Using the Divergence Theorem to compute flux
Let be the cube bounded by the planes , , , and let . Compute the outward flux of over .
SolutionWe compute . By the Divergence Theorem, the outward flux is the triple integral over the domain enclosed by :
The direct flux computation requires six surface integrals, one for each face of the cube. The Divergence Theorem offers a much more simple computation.
Stokes’ Theorem
Just as the spatial Divergence Theorem of this section is an extension of the planar Divergence Theorem, Stokes’ Theorem is the spatial extension of Green’s Theorem. Recall that Green’s Theorem states that the circulation of a vector field around a closed curve in the plane is equal to the sum of the curl of the field over the region enclosed by the curve. Stokes’ Theorem effectively makes the same statement: given a closed curve that lies on a surface , the circulation of a vector field around that curve is the same as the sum of “the curl of the field” across the enclosed surface. We use quotes around “the curl of the field” to signify that this statement is not quite correct, as we do not sum , but , where is a unit vector normal to . That is, we sum the portion of that is orthogonal to at a point.
Green’s Theorem dictated that the curve was to be traversed counterclockwise when measuring circulation. Stokes’ Theorem will follow a right hand rule: when the thumb of one’s right hand points in the direction of , the path will be traversed in the direction of the curling fingers of the hand (this is equivalent to traversing counterclockwise in the plane).
Theorem 15.7.2 Stokes’ Theorem
Let be a piecewise smooth, orientable surface whose boundary is a piecewise smooth curve , let be a unit vector normal to , let be traversed with respect to according to the right hand rule, and let the components of have continuous first partial derivatives over . Then
In general, the best approach to evaluating the surface integral in Stokes’ Theorem is to parameterize the surface with a function . We can find a unit normal vector as
Since , the surface integral in practice is evaluated as
where may be replaced by to properly match the direction of this vector with the orientation of the parameterization of .
Watch the video:
Stokes example part 1 — Multivariable Calculus — Khan Academy from https://youtu.be/E2MRMdaPKcc
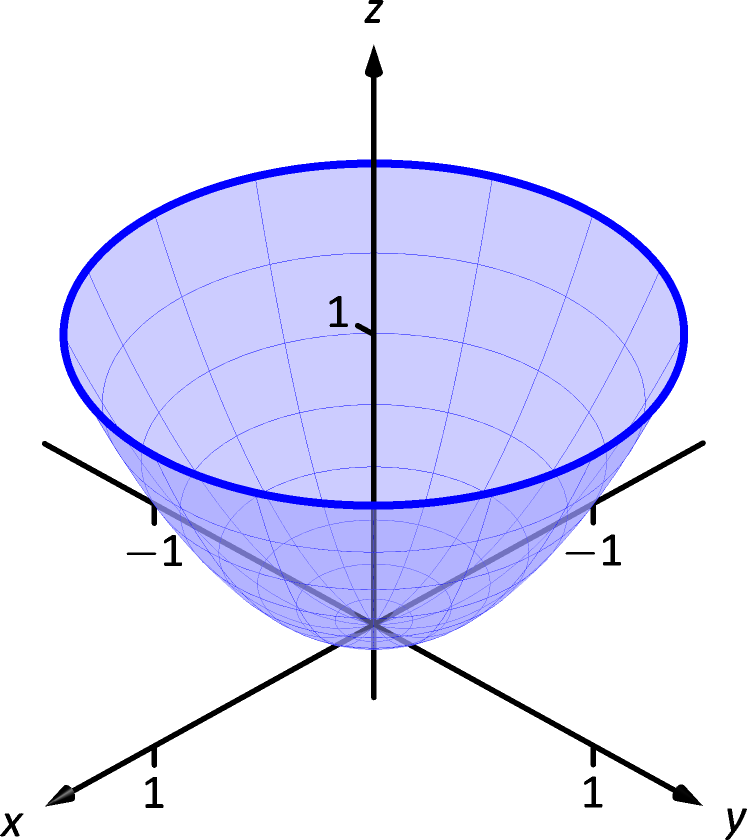
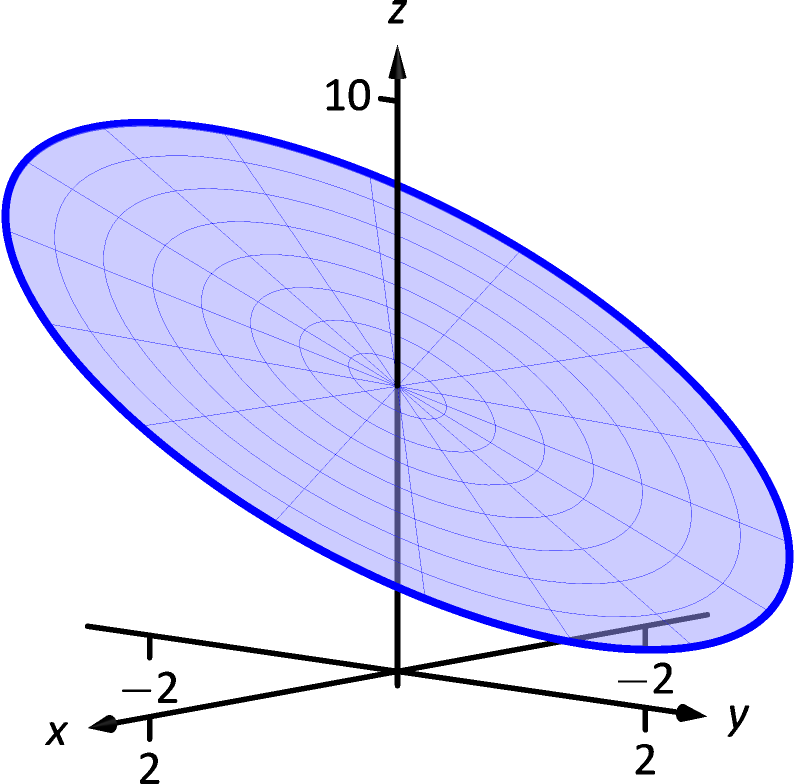
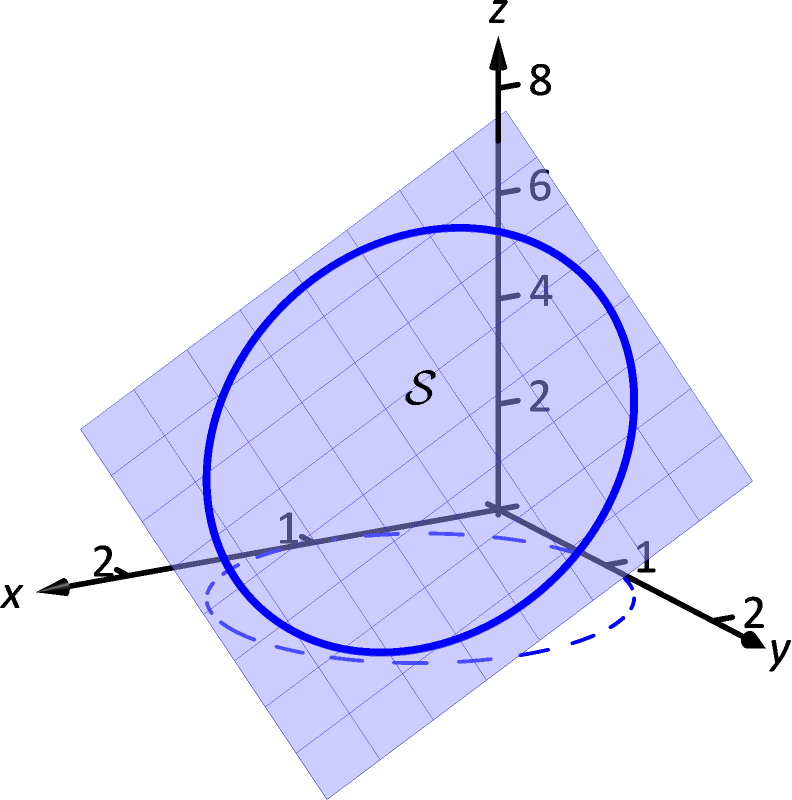 Figure 15.7.4: As given in Example 15.7.5, the surface is the portion of the plane bounded by the curve.
Figure 15.7.4: As given in Example 15.7.5, the surface is the portion of the plane bounded by the curve.
Example 15.7.5 Verifying Stokes’ Theorem
Considering the planar surface , let be the curve in space that lies on this surface above the circle of radius 1 and centered at in the - plane, let be the planar region enclosed by , as illustrated in Figure 15.7.4, and let . Verify Stoke’s Theorem by showing .
SolutionWe begin by parameterizing and then find the circulation. A unit circle centered at can be parameterized with , on ; to put this curve on the surface , make the component equal : . All together, we parameterize with .
The circulation of around is
We now parameterize . (We reuse the letter “r” for our surface as this is our custom.) Based on the parameterization of above, we describe with , where and .
We leave it to the reader to confirm that . As , this vector always has a non-negative -component, which the right-hand rule requires given the orientation of used above. We also leave it to the reader to confirm .
The surface integral of Stokes’ Theorem is thus
which matches our previous result.
One of the interesting results of Stokes’ Theorem is that if two surfaces and share the same boundary, then . That is, the value of these two surface integrals is somehow independent of the interior of the surface. We demonstrate this principle in the next example.
 (a)
(a)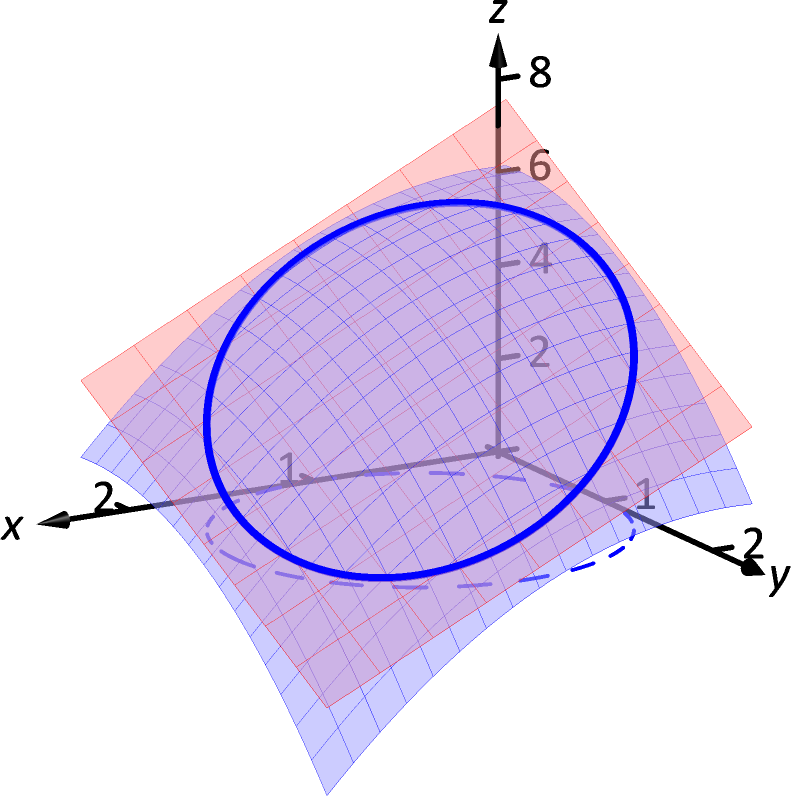 (b)
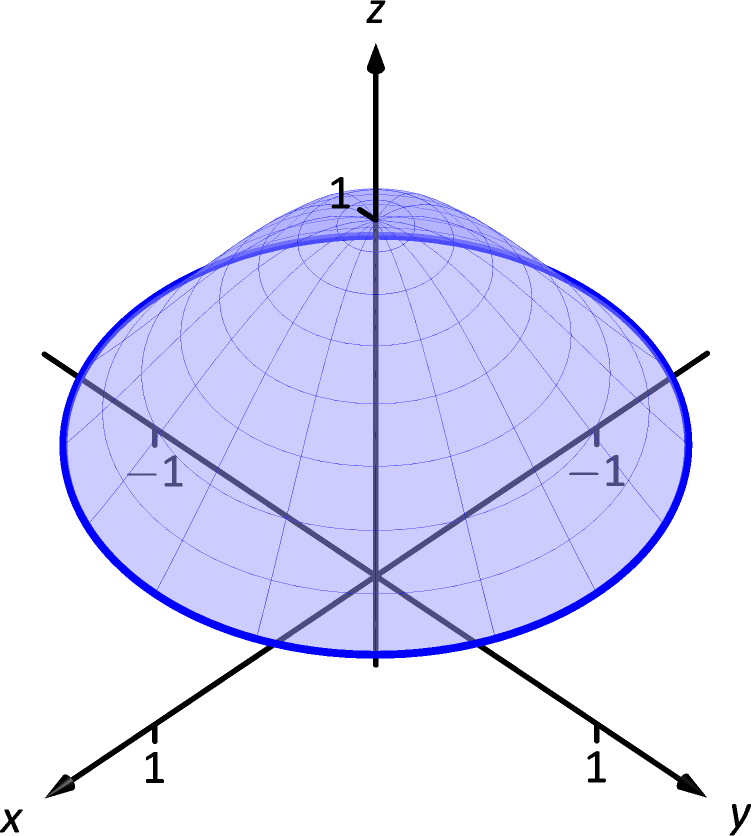
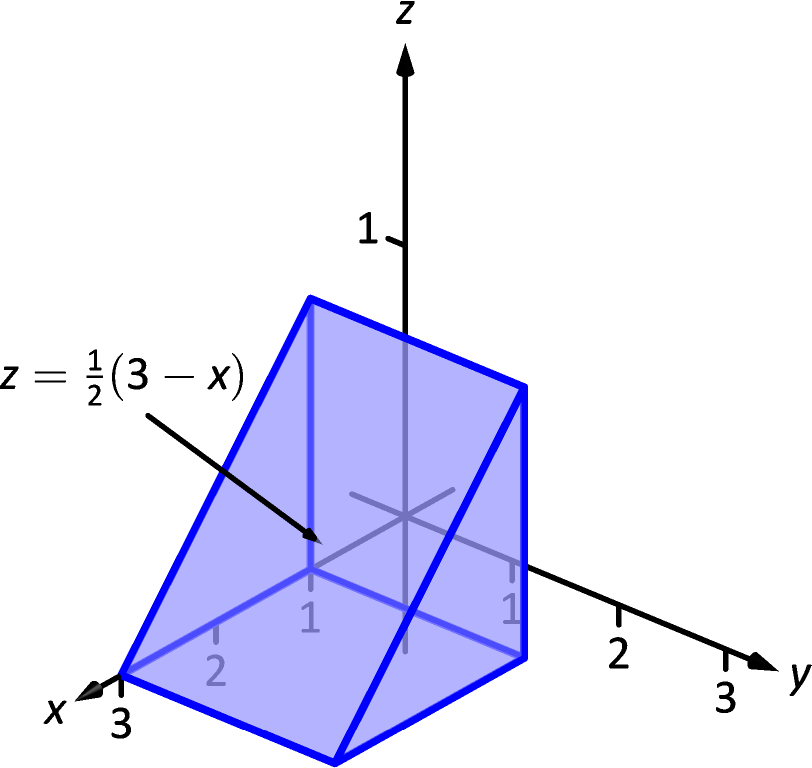
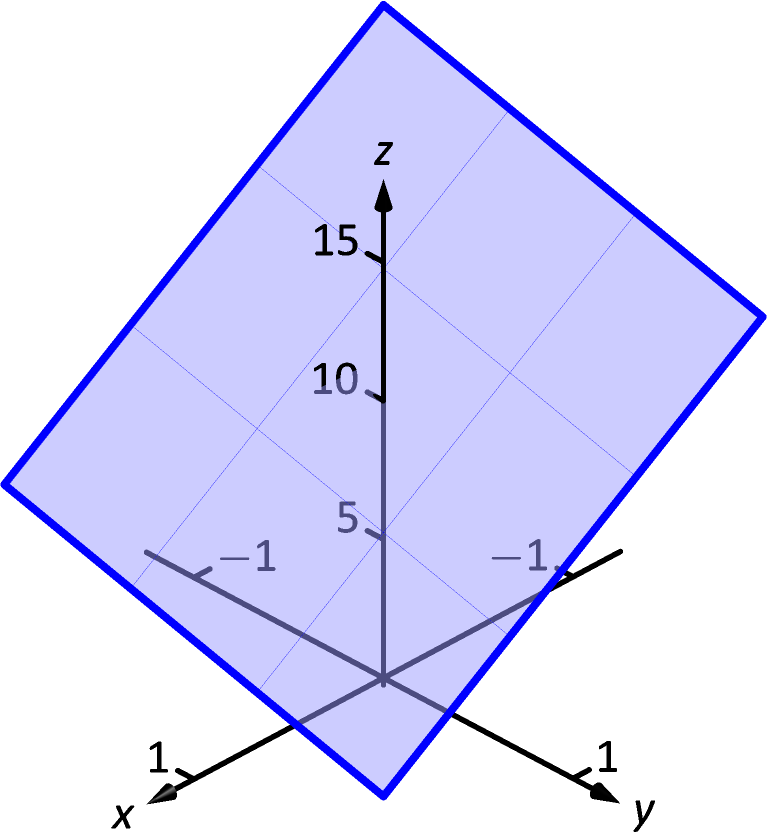
Figure 15.7.5: As given in Example 15.7.6, the surface is the portion of the plane bounded by the curve.
(b)
Figure 15.7.5: As given in Example 15.7.6, the surface is the portion of the plane bounded by the curve.
Example 15.7.6 Stokes’ Theorem and surfaces that share a boundary
Let be the curve given in Example 15.7.5 and note that it lies on the surface . Let be the region of this surface bounded by , and let as in the previous example. Compute to show it equals the result found in the previous example.
SolutionWe begin by demonstrating that lies on the surface . We can parameterize the and components of with , as before. Lifting these components to the surface gives the component as , which is the same component as found in Example 15.7.5. Thus the curve lies on the surface , as illustrated in Figure 15.7.5.
Since and are the same as in the previous example, we already know that . We confirm that this is also the value of .
We parameterize with
where and , and leave it to the reader to confirm that
which also conforms to the right-hand rule with regard to the orientation of . With as before, we have
Even though the surfaces used in this example and in Example 15.7.5 are very different, because they share the same boundary, Stokes’ Theorem guarantees they have equal “sum of curls” across their respective surfaces.
A Common Thread of Calculus
We have threefold interest in each of the major theorems of this chapter: the Fundamental Theorem of Line Integrals, Green’s, Stokes’ and the Divergence Theorems. First, we find the beauty of their truth interesting. Second, each provides two methods of computing a desired quantity, sometimes offering a simpler method of computation.
There is yet one more reason of interest in the major theorems of this chapter. These important theorems also all share an important principle with the Fundamental Theorem of Calculus, introduced in Chapter 5.
Revisit this fundamental theorem, adopting the notation used heavily in this chapter. Let be the interval and let be differentiable on , with . The Fundamental Theorem of Calculus states that
That is, the sum of the rates of change of a function over an interval can also be calculated with a certain sum of itself on the boundary of (in this case, at the points and ).
Each of the named theorems above can be expressed in similar terms. Consider the Fundamental Theorem of Line Integrals: given a function , the gradient is a type of rate of change of . Given a curve with initial and terminal points and , respectively, this fundamental theorem states that
where again the sum of a rate of change of along a curve can also be evaluated by a certain sum of at the boundary of (i.e., the points and ).
Green’s Theorem is essentially a special case of Stokes’ Theorem, so we consider just Stokes’ Theorem here. Recalling that the curl of a vector field is a measure of a rate of change of , Stokes’ Theorem states that over a surface bounded by a closed curve ,
i.e., the sum of a rate of change of can be calculated with a certain sum of itself over the boundary of . In this case, the latter sum is also an infinite sum, requiring an integral.
Finally, the Divergence Theorems state that the sum of divergences of a vector field (another measure of a rate of change of ) over a region can also be computed with a certain sum of over the boundary of that region. When the region is planar, the latter sum of is an integral; when the region is spatial, the latter sum of is a double integral.
The common thread among these theorems: the sum of a rate of change of a function over a region can be computed as another sum of the function itself on the boundary of the region. While very general, this is a very powerful and important statement.
In fact, mathematicians occasionally use the symbol to indicate the boundary of something (so the boundary of would be ). This is the same symbol as a partial derivative, so you’ll have to look at the context to figure out which definition is being used. Having done this, we can express these fundamental theorems in a similar language in Key Idea 15.7.1.
Key Idea 15.7.1 Fundamental Theorems Relating Integrals and Domains
| Theorem | Equation | Orientation |
|---|---|---|
| Fundamental Theoremof Calculus | ||
| Fundamental Theoremof Gradient Fields | goes from to | |
| Green’s Theorem | oriented counterclockwise | |
| Stokes’ Theorem | oriented with to the left | |
| Divergence Theorem | oriented outwards | |
| Divergence Theorem | oriented outwards |
Exercises 15.7
Terms and Concepts
-
1.
What are the differences between the Divergence Theorems of Section 15.4 and this section?
-
2.
What property of a vector field does the Divergence Theorem relate to flux?
-
3.
What property of a vector field does Stokes’ Theorem relate to circulation?
-
4.
Stokes’ Theorem is the spatial version of what other theorem?
Problems
In Exercises 5–8, a closed surface enclosing a domain and a vector field are given. Verify the Divergence Theorem on ; that is, show .
-
5.
is the surface bounding the domain enclosed by the plane and the coordinate planes in the first octant; .
-
6.
is the surface bounding the domain enclosed by the cylinder and the planes and ; .
-
7.
is the surface bounding the domain enclosed by and the plane ; .
-
8.
is the surface composed of , the paraboloid for , and , the disk of radius 2 centered at the origin; .
In Exercises 9–14, a closed curve that is the boundary of a surface is given along with a vector field . Verify Stokes’ Theorem on ; that is, show .
-
9.
is the unit circle in the plane and upper unit hemisphere;
-
10.
is the curve parametrized by and is the portion of enclosed by ;
-
11.
is the curve parametrized by and is the portion of enclosed by ; .
-
12.
is the curve parametrized by and is the portion of enclosed by ; .
-
13.
is the curve that follows the triangle with vertices at , and , traversing the the vertices in that order and returning to , and is the portion of the plane enclosed by ; .
-
14.
is the curve whose and coordinates follow the parabola from to , then follow the line from back to , where the coordinates of are determined by , and is the portion of enclosed by ; .
In Exercises 15–22, a closed surface and a vector field are given. Find the outward flux of over either through direct computation or through the Divergence Theorem.
-
15.
is the sphere of radius 3 centered at the origin;
-
16.
is the boundary of the solid cube ;
-
17.
is the unit sphere centered at the origin;
-
18.
is the unit sphere centered at the origin;
-
19.
is the surface formed by the intersections of and ; .
-
20.
is the surface formed by the intersections of the planes , , , and ; .
-
21.
is the surface formed by the intersections of the planes , and ; .
-
22.
is the surface formed by the intersections of the cylinder and the planes , and ; .
In Exercises 23–26, a closed curve that is the boundary of a surface is given along with a vector field . Find the circulation of around either through direct computation or through Stokes’ Theorem.
-
23.
is the curve whose - and -values are determined by the three sides of a triangle with vertices at , and , traversed in that order, and the -values are determined by the function ; .
-
24.
is the curve whose - and -values are given by and the -values are determined by the function ; .
-
25.
is the curve whose - and -values are given by and the -values are determined by the function ; .
-
26.
is the curve whose - and -values are sides of the square with vertices at , , and , traversed in that order, and the -values are determined by the function ; .
Exercises 27–30 are designed to challenge your understanding and require no computation.
-
27.
Let be any closed surface enclosing a domain . Consider and .
These fields are clearly very different. Why is it that the total outward flux of each field across is the same?
-
28.
(a) Green’s Theorem can be used to find the area of a region enclosed by a curve by evaluating a line integral with the appropriate choice of vector field . What condition on makes this possible? (b) Likewise, Stokes’ Theorem can be used to find the surface area of a region enclosed by a curve in space by evaluating a line integral with the appropriate choice of vector field . What condition on makes this possible?
-
29.
The Divergence Theorem establishes equality between a particular double integral and a particular triple integral. What types of circumstances would lead one to choose to evaluate the triple integral over the double integral?
-
30.
Stokes’ Theorem establishes equality between a particular line integral and a particular double integral. What types of circumstances would lead one to choose to evaluate the double integral over the line integral?
-
31.
Construct a Möbius strip from a piece of paper, then draw a line down its center (like the dotted line in Figure 15.5.1(b)). Cut the Möbius strip along that center line completely around the strip. How many surfaces does this result in? How would you describe them? Are they orientable?
-
32.
Use a computer algebra system to plot the Möbius strip parametrized as: where ,
-
33.
Let be a closed surface and a smooth vector field. Show that . (Hint: Split in half.)
-
34.
Show that Green’s Theorem is a special case of Stokes’ Theorem. (Hint: Think of how a vector field in can be extended in a natural way to be a vector field in .)
