15.5 Parameterized Surfaces and Surface Area
Thus far we have focused mostly on 2-dimensional vector fields, measuring flow and flux along/across curves in the plane. Both Green’s Theorem and the Divergence Theorem make connections between planar regions and their boundaries. We now move our attention to 3-dimensional vector fields, considering both curves and surfaces in space.
We are accustomed to describing surfaces as functions of two variables, usually written as . For our coming needs, this method of describing surfaces will prove to be insufficient. Instead, we will parameterize our surfaces, describing them as the set of terminal points of some vector-valued function . The bulk of this section is spent practicing the skill of describing a surface using a vector-valued function. Once this skill is developed, we’ll show how to find the surface area of a parametrically-defined surface , a skill needed in the remaining sections of this chapter.
Definition 15.5.1 Parameterized Surface
Let be a vector-valued function
that is continuous and one to one on the interior of its domain in the - plane. The set of all terminal points of (i.e., the range of ) is the surface , and along with its domain form a parameterization of .
This parameterization is smooth on if and are continuous and is never on the interior of .
Given a point in the domain of a vector-valued function , the vectors and are tangent to the surface at (a proof of this is developed later in this section). The definition of smoothness dictates that ; this ensures that neither nor are , nor are they ever parallel. Therefore smoothness guarantees that and determine a plane that is tangent to .
Watch the video:
Parametric surfaces — Multivariable calculus — Khan Academy from https://youtu.be/345SnWfahhY
A surface is said to be orientable if a field of normal vectors can be defined on that vary continuously along . This definition may be hard to understand; it may help to know that orientable surfaces are often called “two sided.” A sphere is an orientable surface, and one can easily envision an “inside” and “outside” of the sphere. A paraboloid is orientable, where again one can generally envision “inside” and “outside” sides (or “top” and “bottom” sides) to this surface. Just about every surface that one can imagine is orientable, and we’ll assume all surfaces we deal with in this text are orientable.
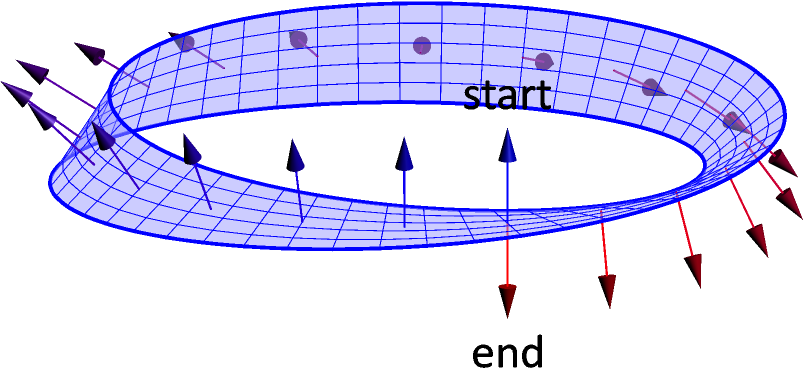 Figure 15.5.1: A Möbius band, a non-orientable surface.
Figure 15.5.1: A Möbius band, a non-orientable surface.
It is enlightening to examine a classic non-orientable surface: the Möbius band, shown in Figure 15.5.1. Vectors normal to the surface are given, starting at the point indicated in the figure. These normal vectors “vary continuously” as they move along the surface. Letting each vector indicate the “top” side of the band, we can easily see near any vector which side is the “top”.
However, if as we progress along the band, we recognize that we are labeling “both sides” of the band as the top; in fact, there are not two “sides” to this band, but one. The Möbius band is a non-orientable surface.
We now practice parameterizing surfaces.
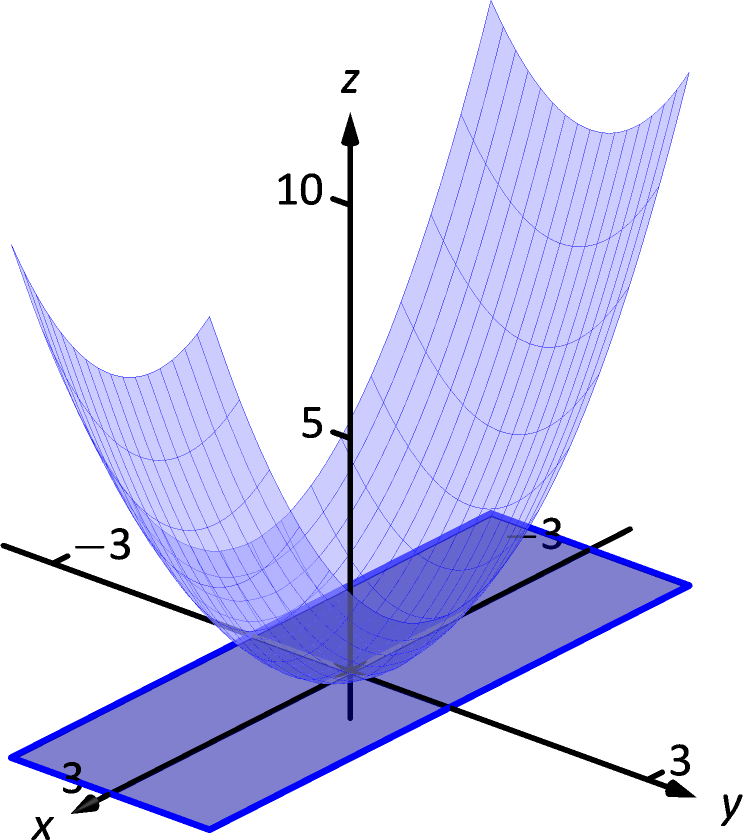 Figure 15.5.2: The surface parameterized in Example 15.5.1.
Figure 15.5.2: The surface parameterized in Example 15.5.1.
Example 15.5.1 Parameterizing a surface over a rectangle
Parameterize the surface over the rectangular region defined by , .
SolutionThere is a straightforward way to parameterize a surface of the form over a rectangular domain. We let and , and let . In this instance, we have , for , . This surface is graphed in Figure 15.5.2.
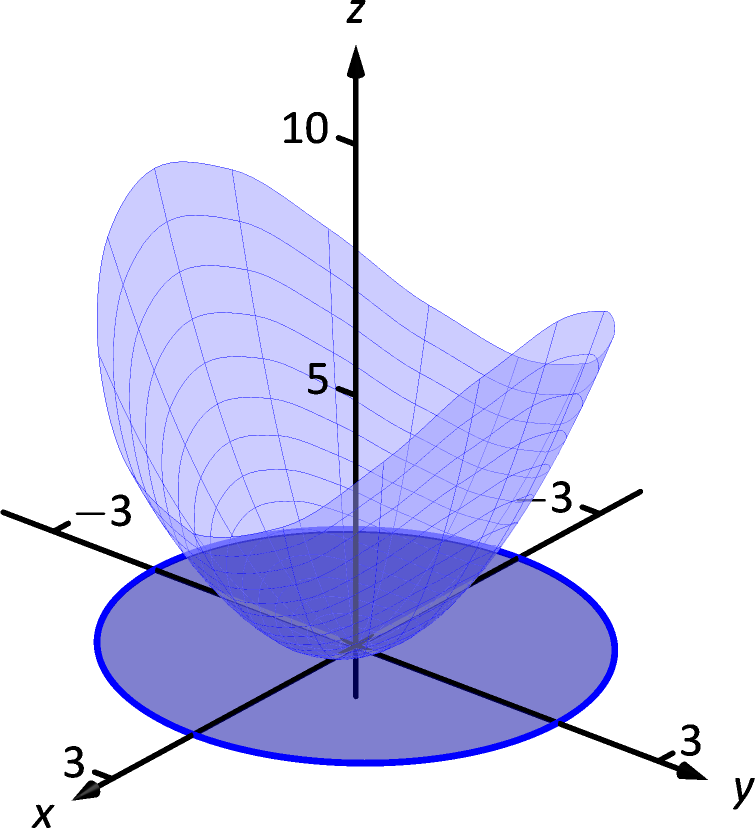 Figure 15.5.3: The surface parameterized in Example 15.5.2.
Figure 15.5.3: The surface parameterized in Example 15.5.2.
Example 15.5.2 Parameterizing a surface over a circular disk
Parameterize the surface over the circular region enclosed by the circle of radius 2 that is centered at the origin.
SolutionWe can parameterize the circular boundary of with the vector-valued function , where . We can obtain the interior of by scaling this function by a variable amount, i.e., by multiplying by : , where .
It is important to understand the role of in the above function. When , we get the boundary of , a circle of radius 2. When , we simply get the point , the center of (which can be thought of as a circle with radius of 0). When , we get the circle of radius that is centered at the origin, which is the circle halfway between the boundary and the center. As varies from 0 to 1, we create a series of concentric circles that fill out all of .
Thus far, we have determined the and components of our parameterization of the surface: and . We find the component simply by using :
Thus , , , which is graphed in Figure 15.5.3. The way that this graphic was generated highlights how the surface was parameterized. When viewing from above, one can see lines emanating from the origin; they represent different values of as sweeps from an angle of 0 up to . One can also see concentric circles, each corresponding to a different value of .
Examples 15.5.1 and 15.5.2 demonstrate an important principle when parameterizing surfaces given in the form over a region : if one can determine and in terms of and , then follows directly as .
In the following two examples, we parameterize the same surface over triangular regions. Each will use as a “scaling factor” as done in Example 15.5.2.
 (b)
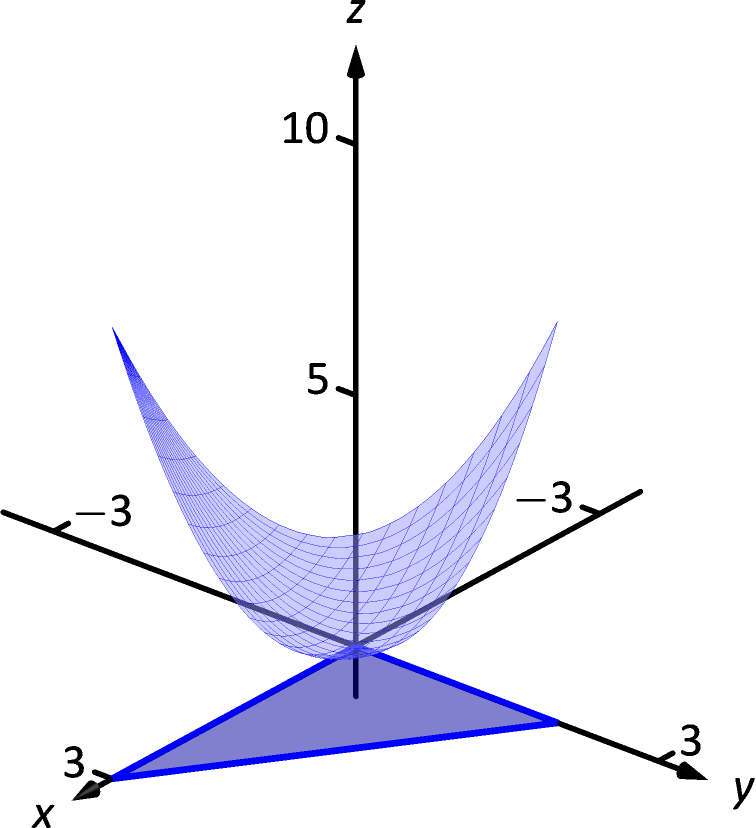
Figure 15.5.4: Part (a) shows a graph of the region , and part (b) shows the surface over , as defined in Example 15.5.3.
(b)
Figure 15.5.4: Part (a) shows a graph of the region , and part (b) shows the surface over , as defined in Example 15.5.3.
Example 15.5.3 Parameterizing a surface over a triangle
Parameterize the surface over the triangular region enclosed by the coordinate axes and the line , as shown in Figure 15.5.4(a).
SolutionWe may begin by letting , , and . This gives only the line on the “upper” side of the triangle. To get all of the region , we can once again scale by a variable factor, .
Still letting , , we let , . When , all -values are 0, and we get the portion of the -axis between and . When , we get the upper side of the triangle. When , we get the line , which is the line “halfway up” the triangle, shown in the figure with a dashed line.
Letting , we have
This surface is graphed in Figure 15.5.4(b). Again, when one looks from above, we can see the scaling effects of : the series of lines that run to the point each represent a different value of .
Another common way to parameterize the surface is to begin with , . Solving the equation of the line for , we have , leading to using , . With , we have , , .
Example 15.5.4 Parameterizing a surface over a triangle
††margin: (a)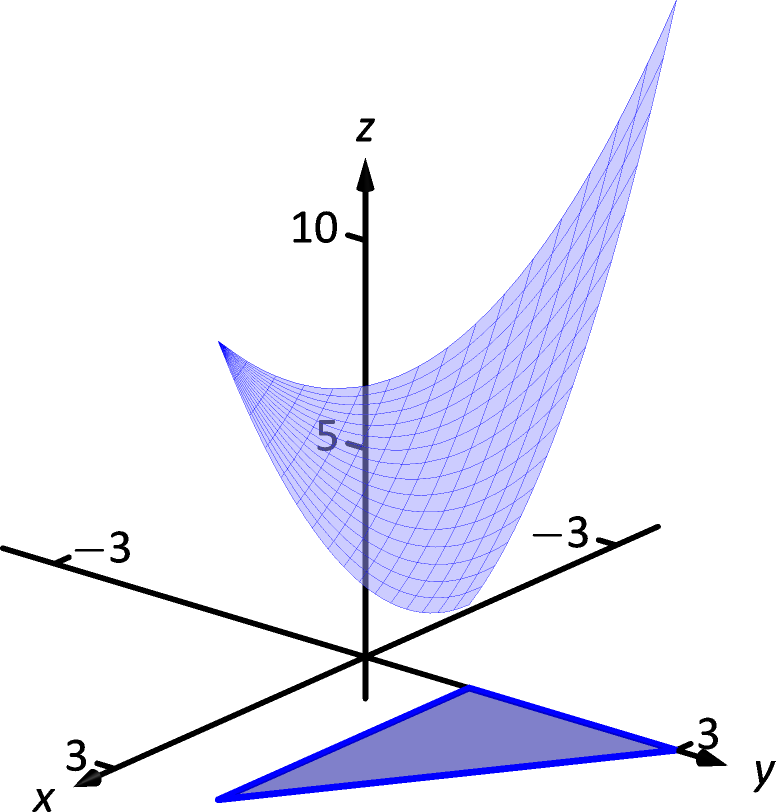 (b)
Figure 15.5.5: Part (a) shows a graph of the region , and part (b) shows the surface over , as defined in Example 15.5.4.
(b)
Figure 15.5.5: Part (a) shows a graph of the region , and part (b) shows the surface over , as defined in Example 15.5.4.
Parameterize the surface over the triangular region enclosed by the lines , and as shown in Figure 15.5.5(a).
SolutionWhile the region in this example is very similar to the region in the previous example, and our method of parameterizing the surface is fundamentally the same, it will feel as though our answer is much different than before.
We begin with letting , . We may be tempted to let , , but this is incorrect. When , we obtain the upper line of the triangle as desired. However, when , the -value is 0, which does not lie in the region .
We will describe the general method of proceeding following this example. For now, consider , . Note that when , we have , the upper line of the boundary of . Also, when , we have , which is the lower boundary of . With , we determine , , .
The surface is graphed in Figure 15.5.5(b).
Given a surface of the form , one can often determine a parameterization of the surface over a region in a manner similar to determining bounds of integration over a region . Using the techniques of Section 14.1, suppose a region can be described by , , i.e., the area of can be found using the iterated integral
When parameterizing the surface, we can let , , and we can let , . The parameterization of is straightforward, but look closely at how is determined. When , . When , .
As a specific example, consider the triangular region from Example 15.5.4, shown in Figure 15.5.5(a). Using the techniques of Section 14.1, we can find the area of as
Following the above discussion, we can set , where , and set , , as used in that example.
One can do a similar thing if is bounded by , , but for the sake of simplicity we leave it to the reader to flesh out those details. The principles outlined above are given in the following Key Idea for reference.
Key Idea 15.5.1 Parameterizing Surfaces
Let a surface be the graph of a function , where the domain of is a closed, bounded region in the - plane. Let be bounded by , , i.e., the area of can be found using the iterated integral , and let .
can be parameterized as
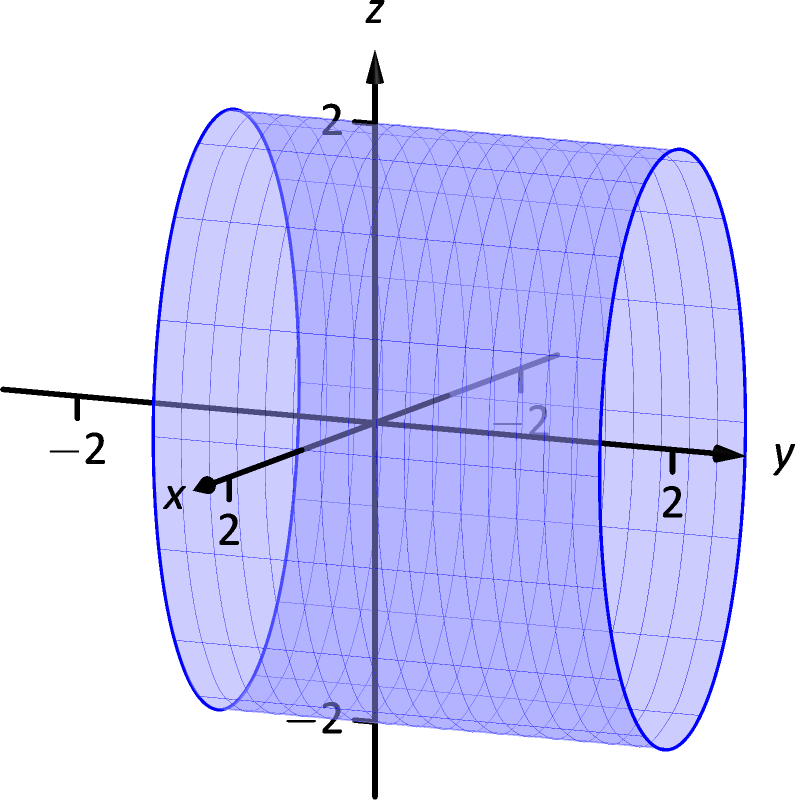 Figure 15.5.6: The cylinder parameterized in Example 15.5.5.
Figure 15.5.6: The cylinder parameterized in Example 15.5.5.
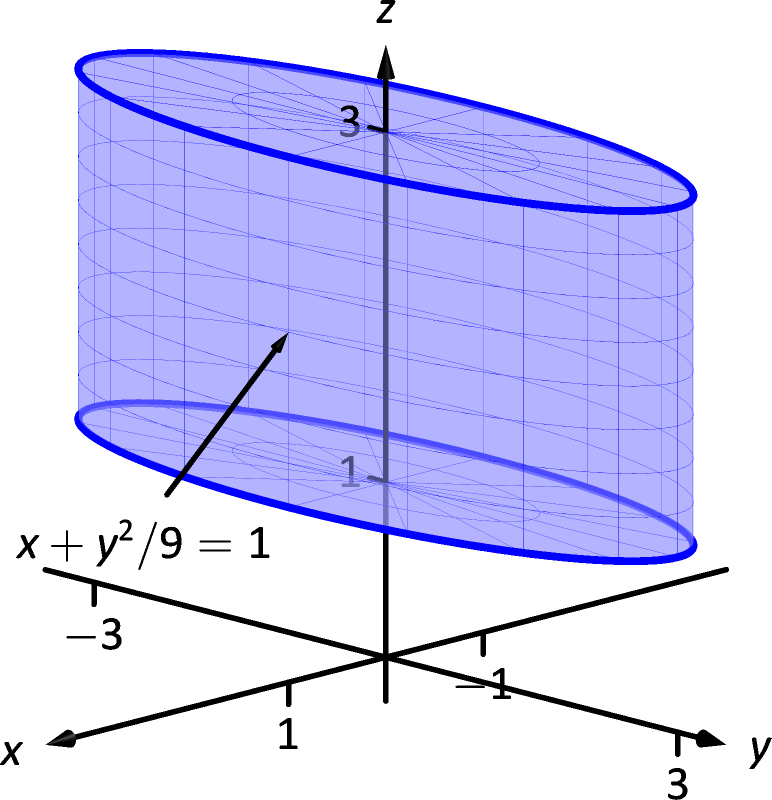
Example 15.5.5 Parameterizing a cylindrical surface
Find a parameterization of the cylinder , where , as shown in Figure 15.5.6.
SolutionThe equation can be envisioned to describe an ellipse in the - plane; as the equation lacks a -term, the equation describes a cylinder (recall Definition 11.1.2) that extends without bound parallel to the -axis. This ellipse has a vertical major axis of length 4, a horizontal minor axis of length 2, and is centered at the origin. We can parameterize this ellipse using sines and cosines; our parameterization can begin with
where we still need to determine the component.
While the cylinder is satisfied by any value, the problem states that all values are to be between and . Since the value of does not depend at all on the values of or , we can use another variable, , to describe . Our final answer is
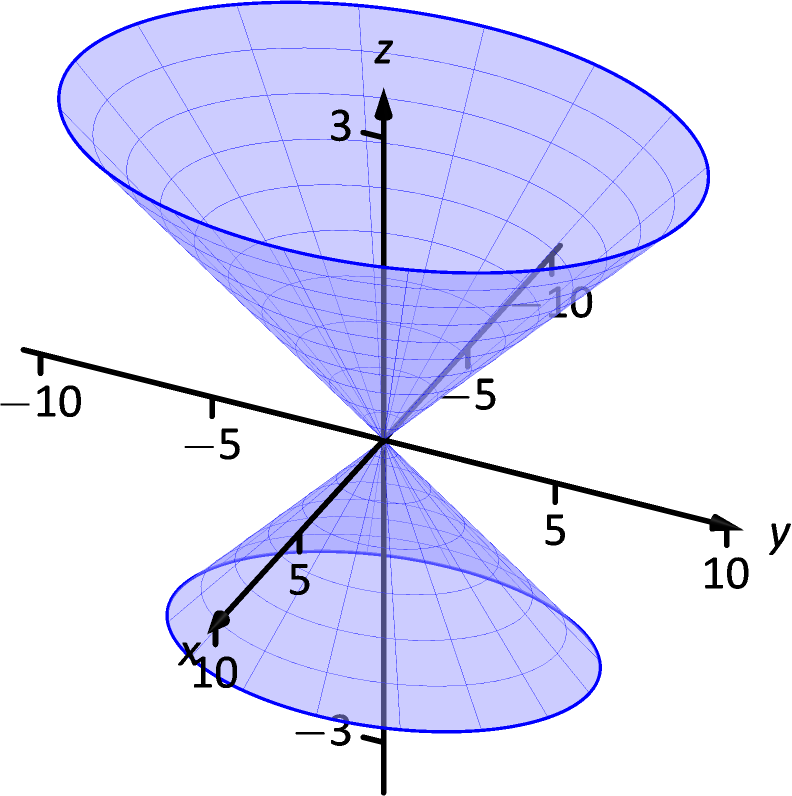 Figure 15.5.7: The elliptic cone as described in Example 15.5.6.
Figure 15.5.7: The elliptic cone as described in Example 15.5.6.
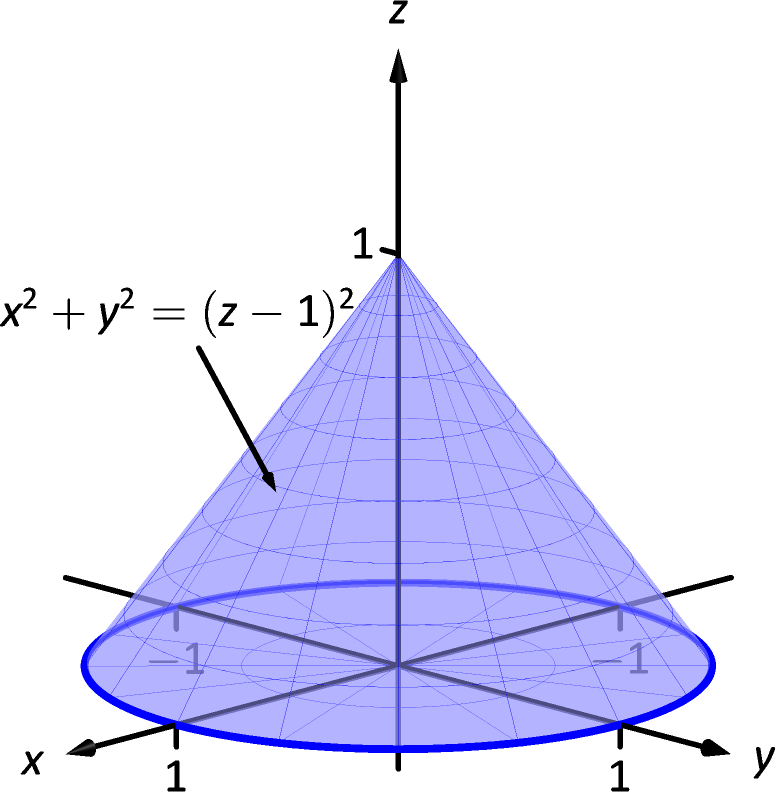
Example 15.5.6 Parameterizing an elliptic cone
Find a parameterization of the elliptic cone , where , as shown in Figure 15.5.7.
SolutionOne way to parameterize this cone is to recognize that given a value, the cross section of the cone at that value is an ellipse with equation . We can let , for and then parameterize the above ellipses using sines, cosines and .
We can parameterize the component of our surface with and the component with , where . Putting all components together, we have
††margin:
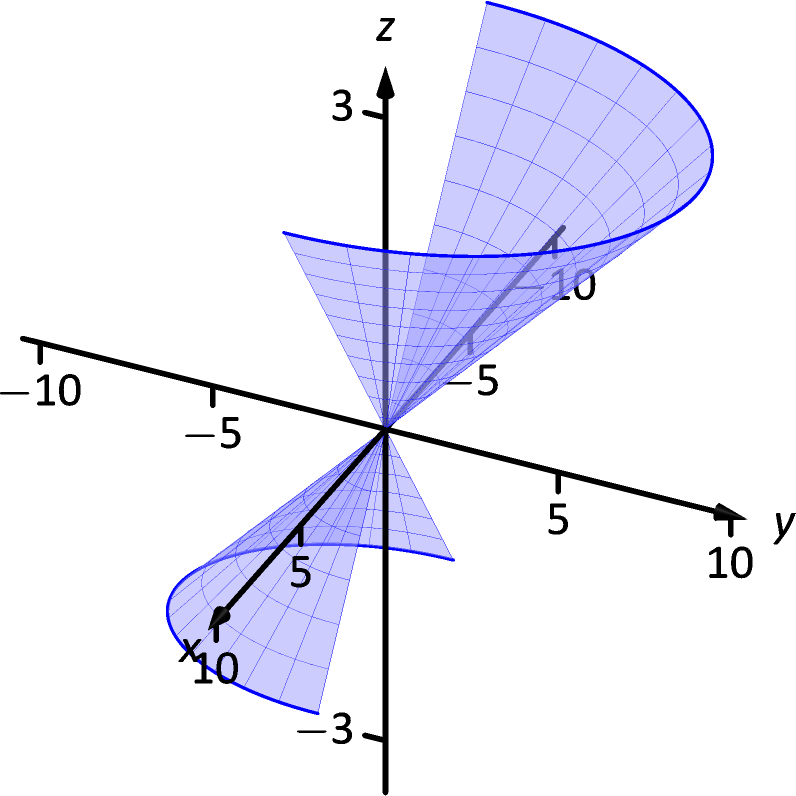 Figure 15.5.8: The elliptic cone as described in Example 15.5.6 with restricted domain.
Figure 15.5.8: The elliptic cone as described in Example 15.5.6 with restricted domain.
When takes on negative values, the radii of the cross-sectional ellipses become “negative,” which can lead to some surprising results. Consider Figure 15.5.8, where the cone is graphed for . Because is negative below the - plane, the radii of the cross-sectional ellipses are negative, and the opposite side of the cone is sketched below the - plane.
 (a)
(a)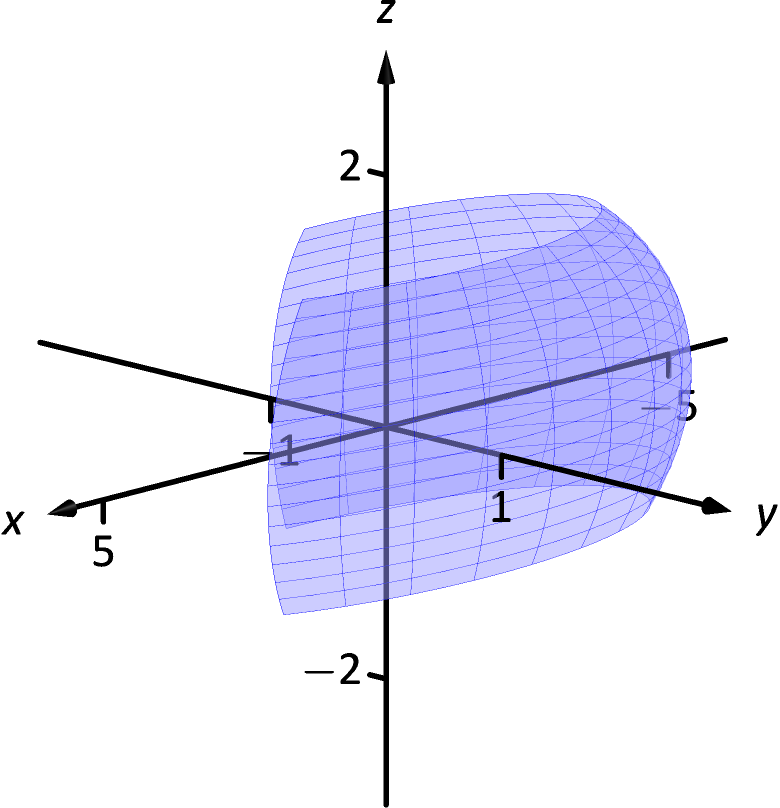 (b)
Figure 15.5.9: An ellipsoid in (a), drawn again in (b) with its domain restricted, as described in Example 15.5.7.
(b)
Figure 15.5.9: An ellipsoid in (a), drawn again in (b) with its domain restricted, as described in Example 15.5.7.
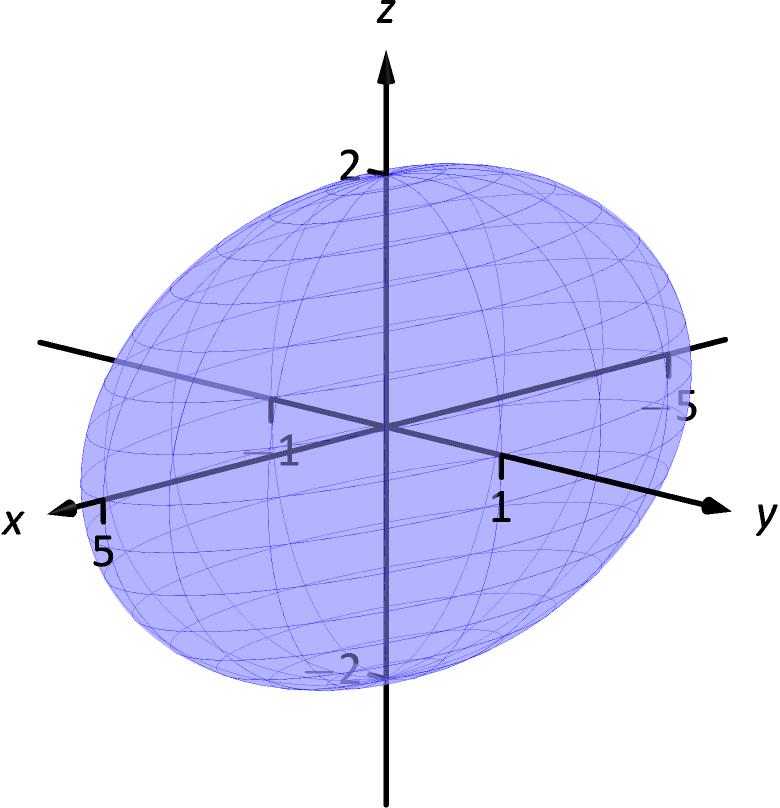
Example 15.5.7 Parameterizing an ellipsoid
Find a parameterization of the ellipsoid as shown in Figure 15.5.9(a).
SolutionRecall Key Idea 11.2.1 from Section 11.2, which states that all unit vectors in space have the form for some angles and . If we choose our angles appropriately, this allows us to draw the unit sphere. To get an ellipsoid, we need only scale each component of the sphere appropriately.
The -radius of the given ellipsoid is 5, the -radius is 1 and the -radius is 2. Substituting for and for , we have , where we still need to determine the ranges of and .
Note how the and components of have and terms, respectively. This hints at the fact that ellipses are drawn parallel to the - plane as varies, which implies we should have range from to .
One may be tempted to let as well, but note how the component is . We only need to take on values between and once, therefore we can restrict to .
The final parameterization is thus
In Figure 15.5.9(b), the ellipsoid is graphed on , to demonstrate how each variable affects the surface.
Parameterization is a powerful way to represent surfaces. One of the advantages of the methods of parameterization described in this section is that the domain of is always a rectangle; that is, the bounds on and are constants. This will make some of our future computations easier to evaluate.
Just as we could parameterize curves in more than one way, there will always be multiple ways to parameterize a surface. Some ways will be more “natural” than others, but these other ways are not incorrect. Because technology is often readily available, it is often a good idea to check one’s work by graphing a parameterization of a surface to check if it indeed represents what it was intended to.
Surface Area
††margin: (a)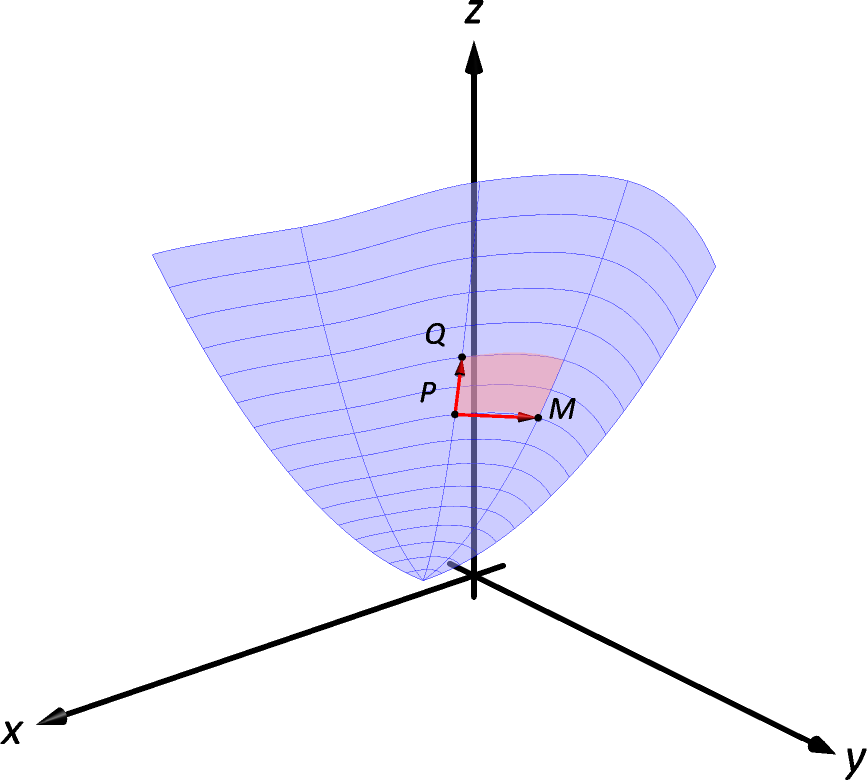 (b)
(b)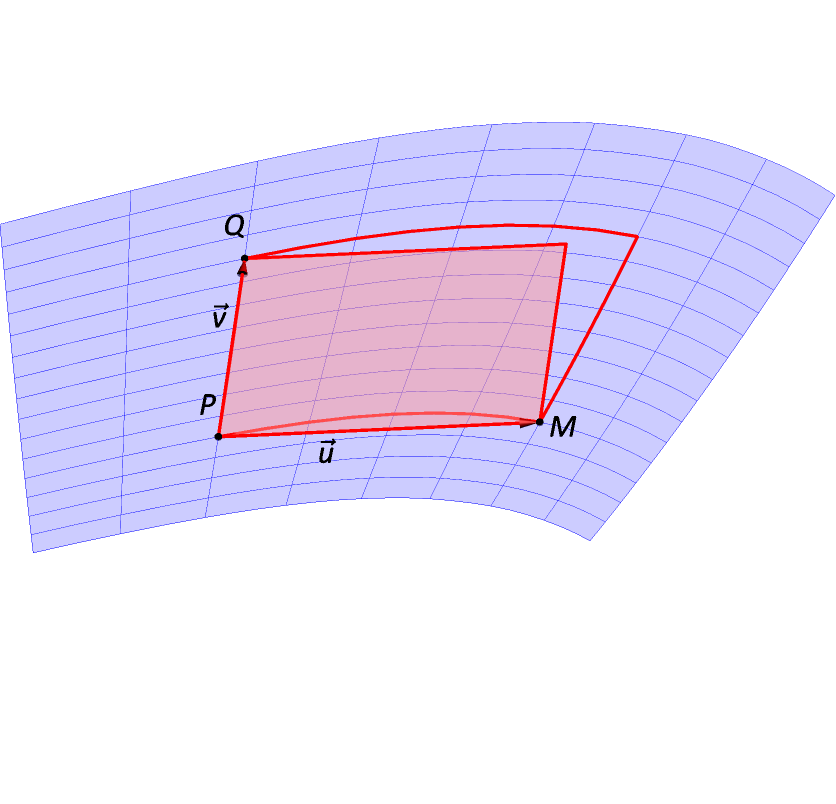 (c)
Figure 15.5.10: Illustrating the process of finding surface area by approximating with planes.
(c)
Figure 15.5.10: Illustrating the process of finding surface area by approximating with planes.
It will become important in the following sections to be able to compute the surface area of a surface given a smooth parameterization , , . Following the principles given in the integration review at the beginning of this chapter, we can say that
where represents a small amount of surface area. That is, to compute total surface area , add up lots of small amounts of surface area across the entire surface . The key to finding surface area is knowing how to compute . We begin by approximating.
In Section 14.5 we used the area of a plane to approximate the surface area of a small portion of a surface. We will do the same here.
Let be the region of the - plane bounded by , as shown in Figure 15.5.10(a). Partition into rectangles of width and height , for some . Let be the lower left corner of some rectangle in the partition, and let and be neighboring corners as shown.
The point maps to a point on the surface , and the rectangle with corners , and maps to some region (probably not rectangular) on the surface as shown in Figure 15.5.10(b), where and . We wish to approximate the surface area of this mapped region.
Let and . These two vectors form a parallelogram, illustrated in Figure 15.5.10(c), whose area approximates the surface area we seek. In this particular illustration, we can see that parallelogram does not particularly match well the region we wish to approximate, but that is acceptable; by increasing the number of partitions of , and shrink and our approximations will become better.
From Section 11.4 we know the area of this parallelogram is . If we repeat this approximation process for each rectangle in the partition of , we can sum the areas of all the parallelograms to get an approximation of the surface area :
where and .
From our previous calculus experience, we expect that taking a limit as will result in the exact surface area. However, the current form of the above double sum makes it difficult to realize what the result of that limit is. The following rewriting of the double summation will be helpful:
We now take the limit as , forcing and to 0. As ,
(This limit process also demonstrates that and are tangent to the surface at . We don’t need this fact now, but it will be important in the next section.)
Thus, in the limit, the double sum leads to a double integral:
Theorem 15.5.1 Surface Area of Parametrically Defined Surfaces
Let be a smooth parameterization of a surface over a closed, bounded region of the - plane.
-
•
The surface area differential is: .
-
•
The surface area of is
Example 15.5.8 Finding the surface area of a parameterized surface
Using the parameterization found in Example 15.5.2, find the surface area of over the circular disk of radius 2, centered at the origin.
SolutionIn Example 15.5.2, we parameterized the surface as , for , . To find the surface area using Theorem 15.5.1, we need . We find:
Thus the surface area is
There is a lot of tedious work in the above calculations and the final integral is nontrivial. The use of a computer-algebra system is highly recommended.
In Section 15.1, we recalled the arc length differential . In subsequent sections, we used that differential, but in most applications the “” part of the differential canceled out of the integrand (to our benefit, as integrating the square roots of functions is generally difficult). We will find a similar thing happens when we use the surface area differential in the following sections. That is, our main goal is not to be able to compute surface area; rather, surface area is a tool to obtain other quantities that are more important and useful. In our applications, we will use , but most of the time the “” part will cancel out of the integrand, making the subsequent integration easier to compute.
Exercises 15.5
Terms and Concepts
-
1.
In your own words, describe what an orientable surface is.
-
2.
Give an example of a non-orientable surface.
Problems
In Exercises 3–4, parametrize the surface defined by the function over each of the given regions of the - plane.
-
3.
; (a) is the rectangle bounded by and . (b) is the circle of radius 3, centered at . (c) is the triangle with vertices , and . (d) is the region bounded by the -axis and the graph of .
-
4.
; (a) is the rectangle bounded by and . (b) is the ellipse with major axis of length 8 parallel to the -axis, and minor axis of length 6 parallel to the -axis, centered at the origin. (c) is the triangle with vertices , and . (d) is the annulus bounded between the circles, centered at the origin, with radius 2 and radius 5.
In Exercises 5–8, a surface in space is described that cannot be defined in terms of a function . Give a parametrization of .
-
5.
is the rectangle in space with corners at , , and .
-
6.
is the triangle in space with corners at , and .
-
7.
is the ellipsoid .
-
8.
is the elliptic cone , for .
In Exercises 9–16, a domain in space is given. Parametrize each of the bounding surfaces of .
-
9.
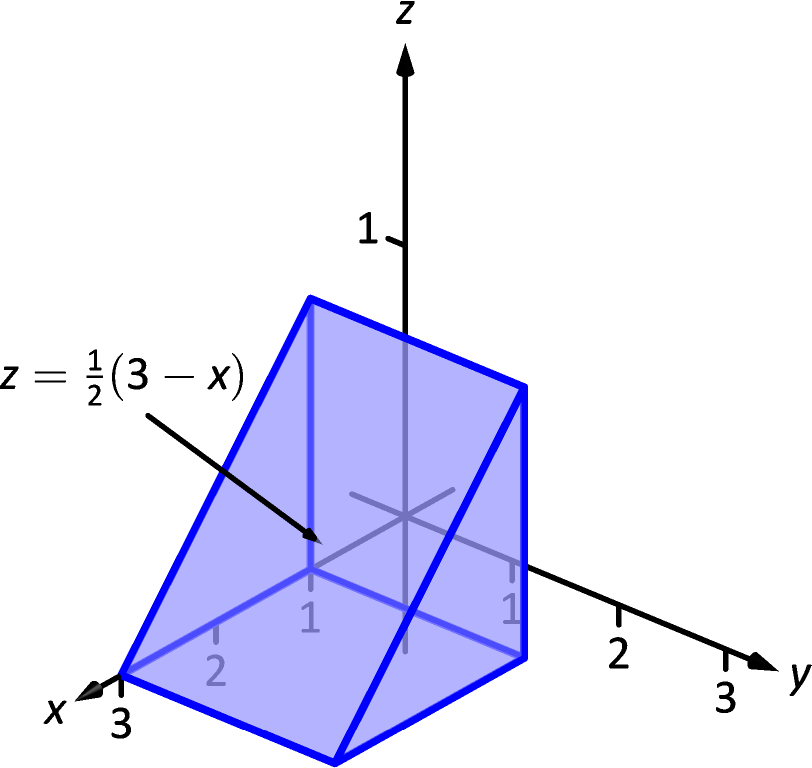
is the domain bounded by the planes , , , and .
-
10.
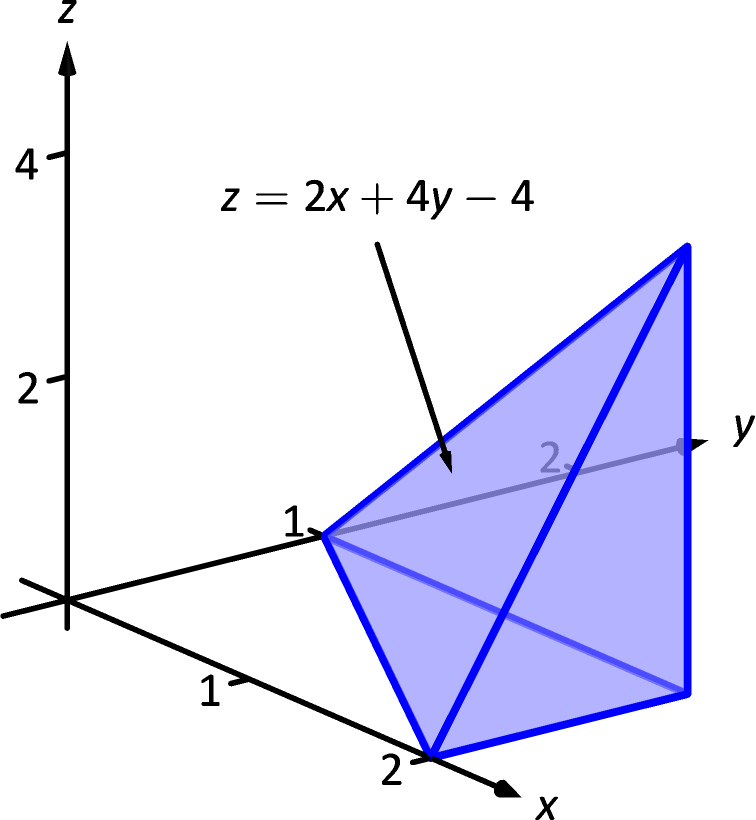
is the domain bounded by the planes , , and .
-
11.
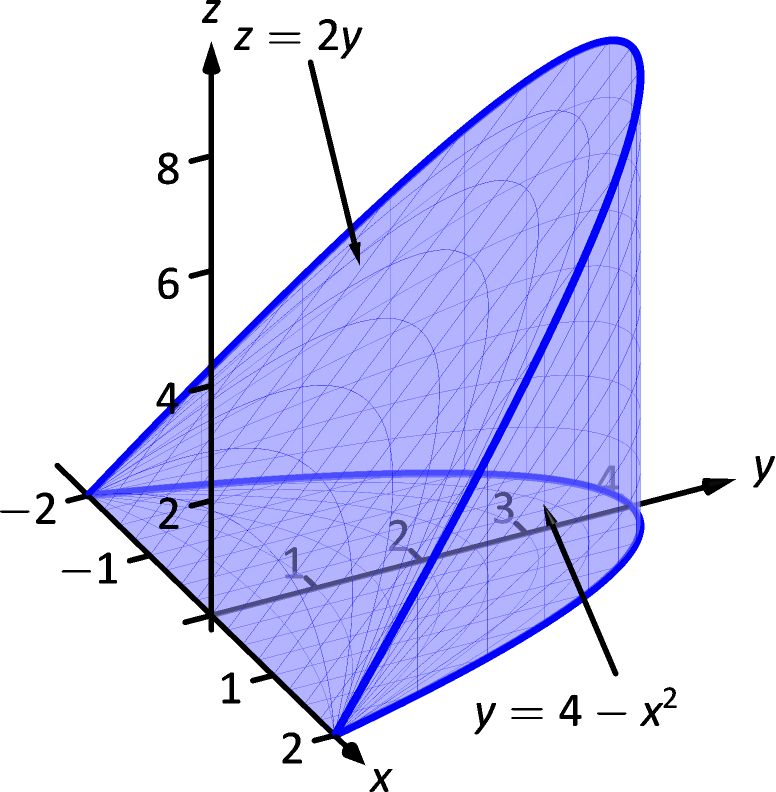
is the domain bounded by , and .
-
12.
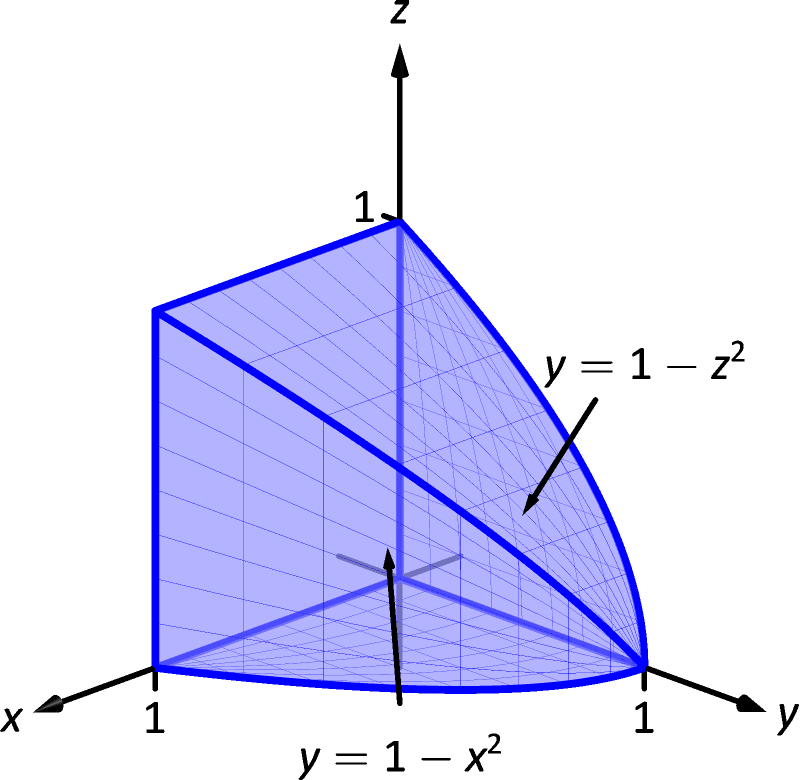
is the domain bounded by , , , and .
-
13.
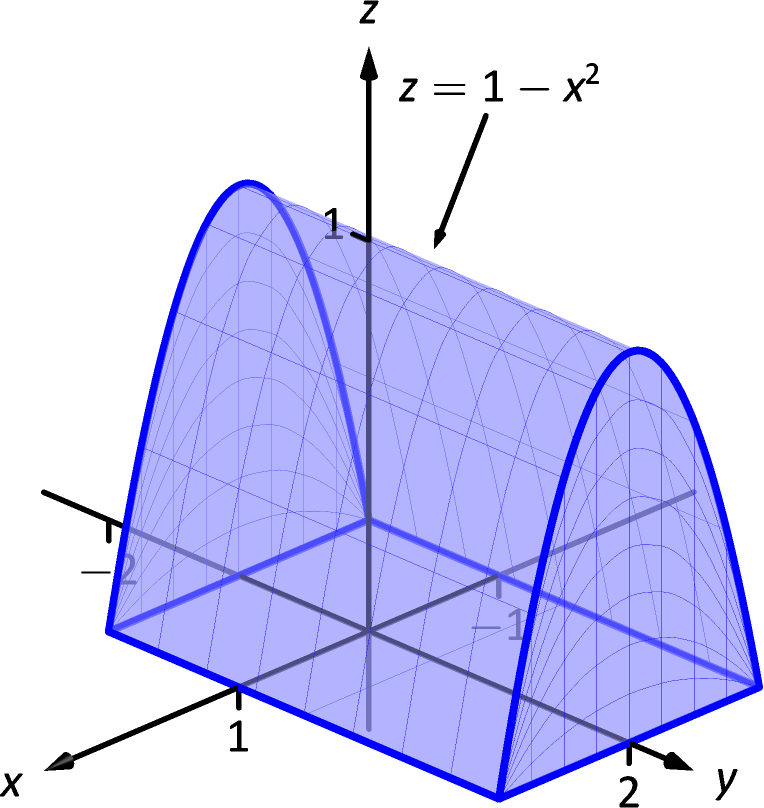
is the domain bounded by the cylinder and the planes and .
-
14.
is the domain bounded by the cone and the plane .
-
15.
is the domain bounded by the cylinder and the planes , and .
-
16.
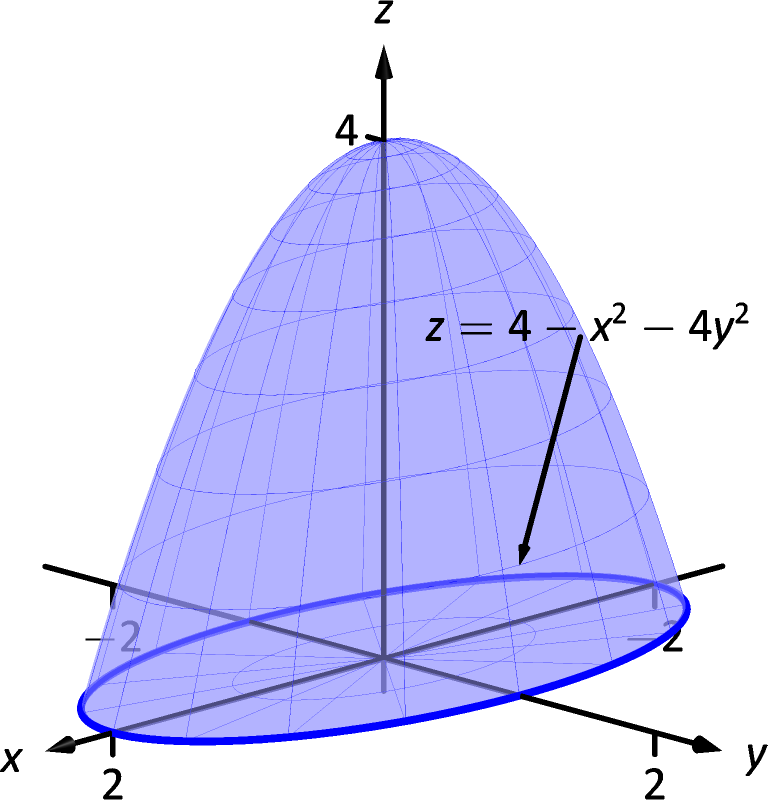
is the domain bounded by the paraboloid and the plane .
In Exercises 17–22, find the surface area of the given surface . (The associated integrals are computable without the assistance of technology.)
-
17.
is the plane over the rectangle , .
-
18.
is the plane over the triangle with vertices at , and .
-
19.
is the plane over the circular disk, centered at the origin, with radius 2.
-
20.
is the plane over the annulus bounded by the circles, centered at the origin, with radius 1 and radius 2.
-
21.
is a sphere of radius . (Hint: Use spherical coordinates to parametrize the sphere.)
-
22.
is a right circular cone of radius and height . (Hint: Use the parametrization , , , for and .)
-
23.
The ellipsoid can be parametrized using ellipsoidal coordinates for and . Show that the surface area of the ellipsoid is given by (Note: The above double integral can not be evaluated by elementary means. For specific values of , and it can be evaluated using numerical methods. An alternative is to express the surface area in terms of elliptic integrals.)
-
24.
Use Theorem 15.5.1 to prove that the surface area over a region in of a surface is given by the formula (Hint: Think of the parametrization of the surface.)
In Exercises 25–28, set up the double integral that finds the surface area of the given surface , then use technology to approximate its value.
-
25.
is the paraboloid over the circular disk of radius 3 centered at the origin.
-
26.
is the paraboloid over the triangle with vertices at , and .
-
27.
is the plane over the region enclosed by the parabola and the -axis.
-
28.
is the hyperbolic paraboloid over the circular disk of radius 1 centered at the origin.
